Configuración de un espacio de trabajo de PhotoRobot
El siguiente manual de usuario describe los pasos para configurar un Espacio de Trabajo en la aplicación PhotoRobot Controls (más adelante, simplemente "CAPP"). Un espacio de trabajo es una lista de hardware que se utilizará para una sesión de fotos específica. Puede incluir varios módulos PhotoRobot, cámaras, luces y otros accesorios.
Nota: Si aún no has instalado ni te has familiarizado con CAPP, consulta PhotoRobot Getting Started para una visión general del software, su configuración y su uso. La información de este manual de usuario tiene como objetivo apoyar a los clientes que ya han alcanzado un conocimiento general del software.
Además, para fines de demostración, hay que tener en cuenta que es posible trabajar con un Espacio de Trabajo de Ejemplo predefinido, que está configurado para usar hardware virtual. Un espacio de trabajo de muestra permite a los usuarios experimentar con diversas funciones en CAPP seleccionando robots y cámaras virtuales.
Para crear un espacio de trabajo, ve a Espacios de trabajo en CAPP y luego pulsa el botón de crear (+).
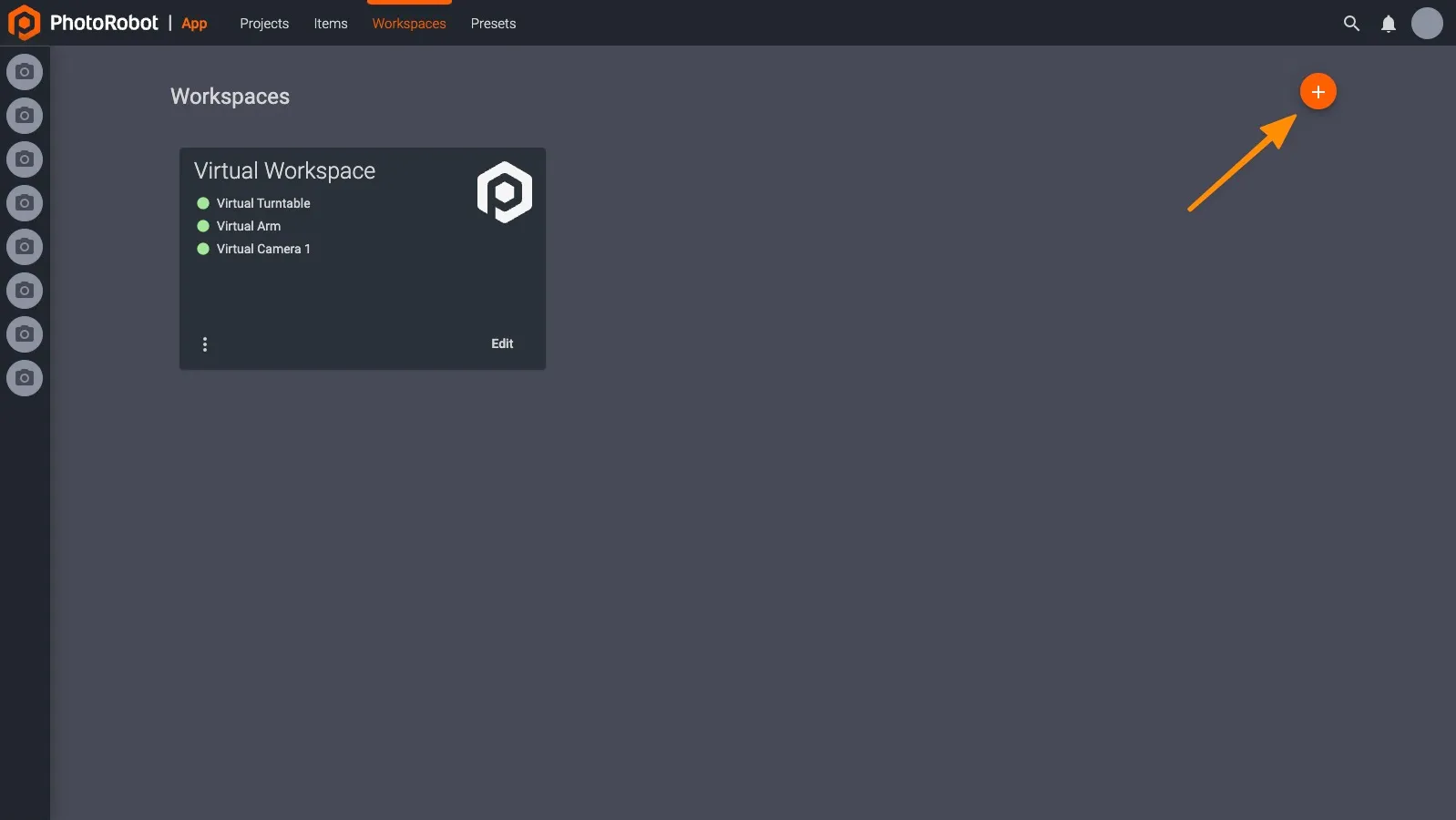
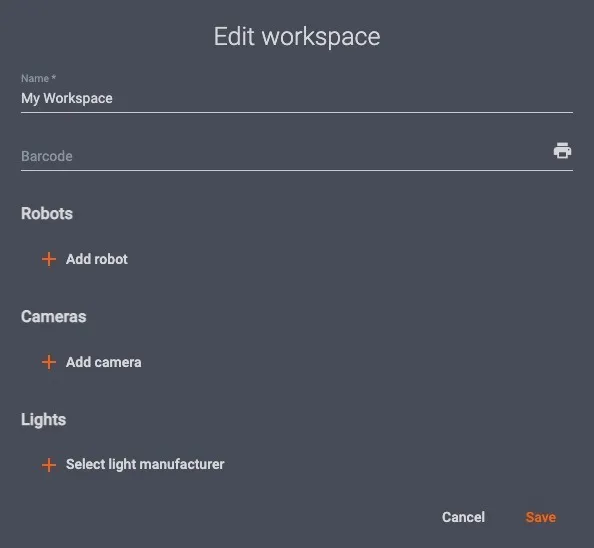
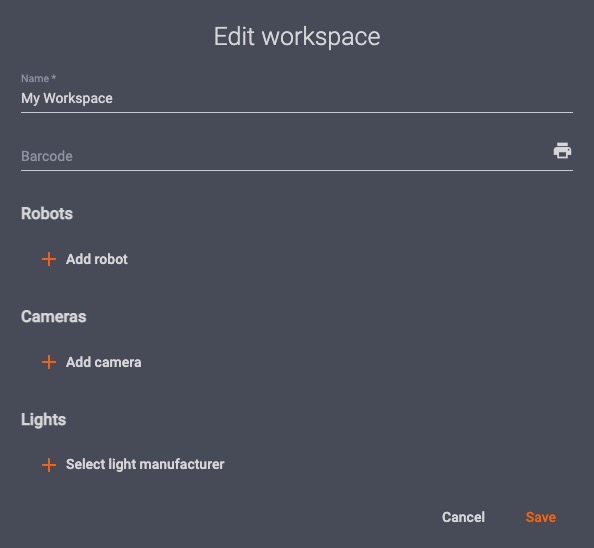
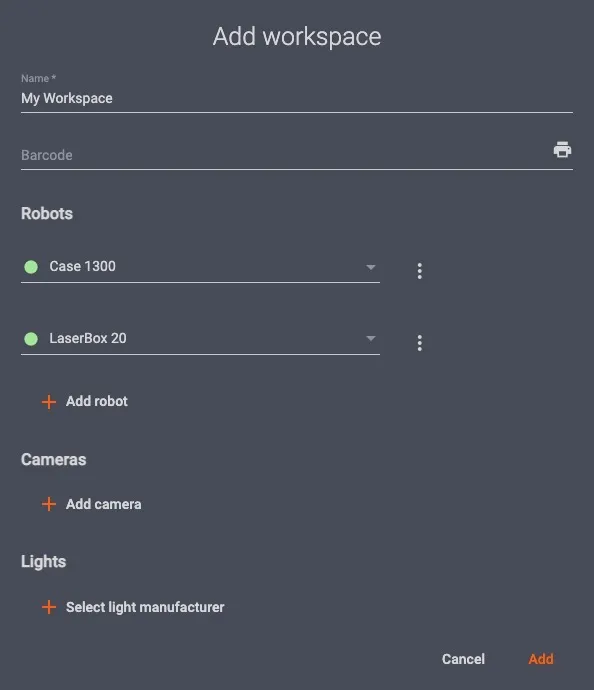
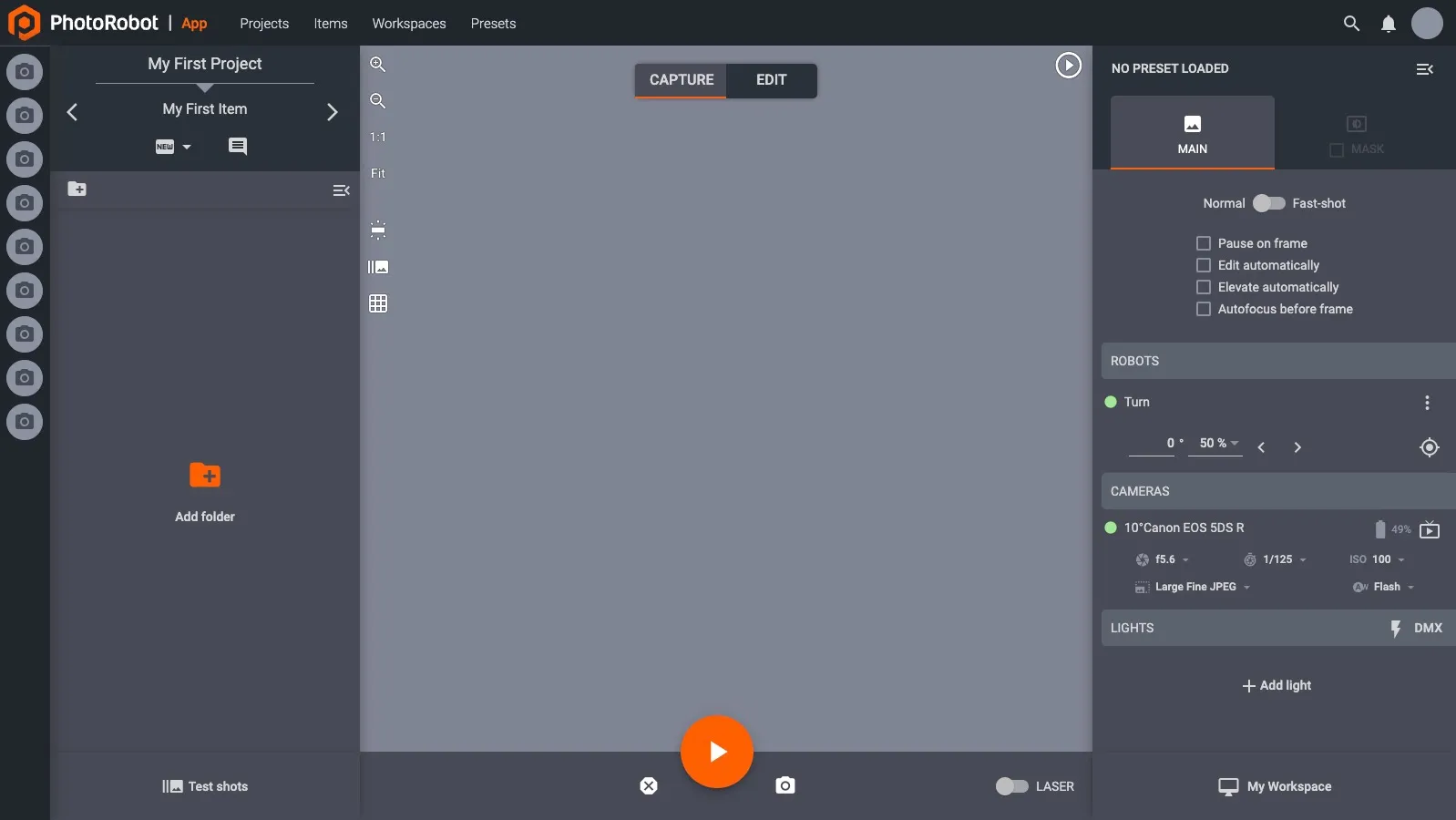
Pulsar el botón de crear abrirá el menú de Editar espacio de trabajo, donde es posible añadir robot, añadir cámara y seleccionar fabricante de luz.
Ten en cuenta que después de conectar un hardware (o cámara) a un espacio de trabajo, puedes ver inmediatamente si está en línea (reconocido por CAPP). Para ello, comprueba el color del punto a la izquierda del nombre del equipo en cuestión. Si el dispositivo es reconocido, aparecerá un punto verde.

Alternativamente, un punto gris indica que el hardware no fue reconocido o que no está encendido. Si hay un punto rojo, hay un error, como que el usuario no cambia la cámara a modo manual. Para identificar la causa del error, pasa el ratón sobre el punto rojo para mostrar una descripción emergente con la descripción del error ocurrido.
Para problemas comunes y sus soluciones, consulte el Manual de Resolución de Problemas de PhotoRobot.
Agregar robot
En el siguiente paso, asegúrese de que todos los robots para la sesión de fotos estén encendidos y conectados a la misma red de área local que su computadora. A continuación, pulse Añadir robot.
- Pulse Añadir robot para ver una lista de los robots disponibles.
- Seleccione los robots que utilizará de la lista.
Configurar Fast-Shot
Para activar el modo de disparo rápido, conecte cualquier robot con una cámara a través de un cable de obturador.
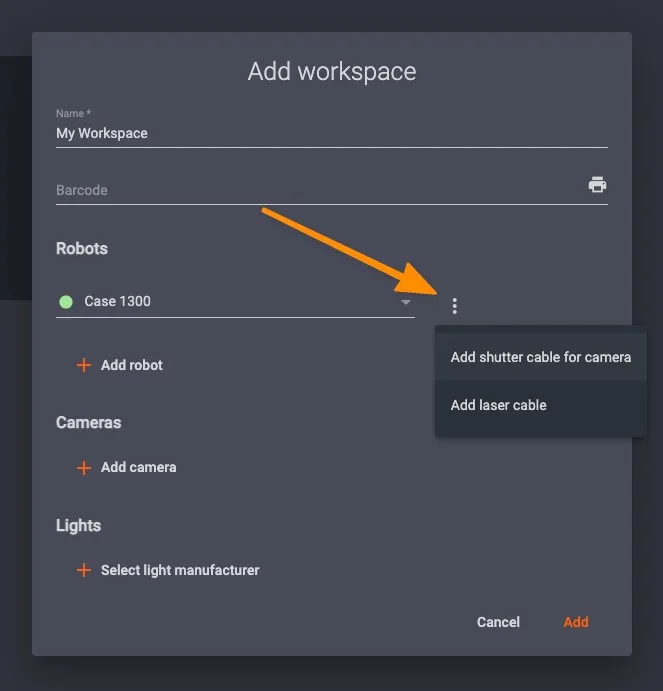
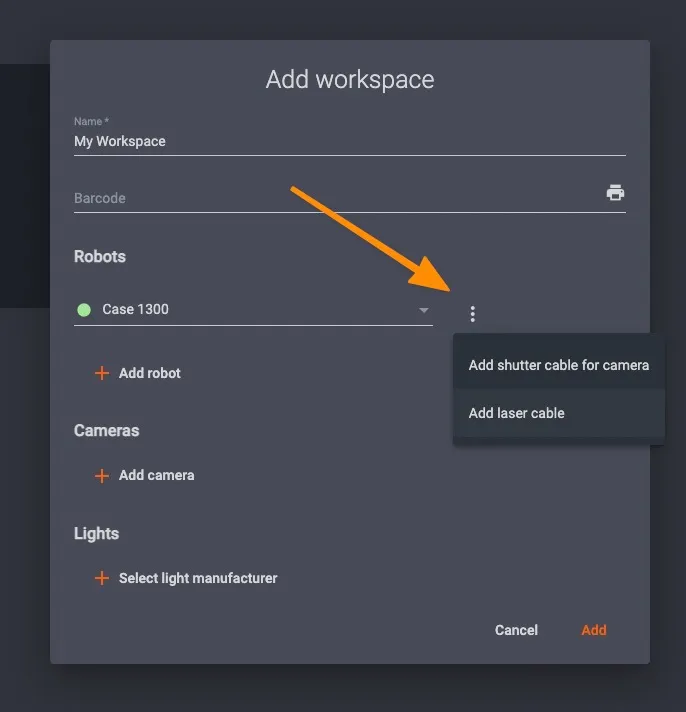
- Haga clic en los tres puntos verticales a la derecha del robot para abrir el menú de la cámara.
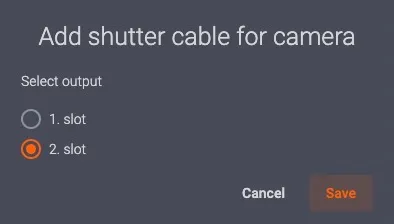
- Seleccione Agregar cable de obturador para la cámara.
- Elija Ranura de salida (1 o 2). Seleccione qué ranura de salida en función del cableado físico del cable del obturador. Para cables de PhotoRobot, utilice la ranura 2.
( ! ) - Para otros fabricantes, puede ser necesario usar la ranura 1.
Configurar láseres
Dependiendo del hardware en uso, hay varias opciones para configurar láseres:
Para láseres integrados
Tanto el Case 850 como el 1300 tienen sistemas láser diseñados en el robot con cero configuración requerida.
LaserBox de 20 puertos
El LaserBox de 20 puertos es un dispositivo independiente que permite el control de múltiples láseres a través de una conexión de red. Para configurar el LaserBox, asegúrese primero de que esté encendido y, a continuación, agréguelo como otro robot al espacio de trabajo:
LaserBox de 4 puertos
Si tiene un LaserBox de 4 puertos conectado a su robot, seleccione Agregar cable láser en los elementos del menú de 3 puntos a la derecha del ID del robot:
Agregar cámaras
Para agregar una cámara, primero asegúrese de que el dispositivo esté encendido y conectado a través de USB a la computadora. Si no está utilizando un robot con capacidad de balanceo (por ejemplo, el brazo robótico o el marco), también deberá establecer el ángulo en el que la cámara apuntará a la mesa.
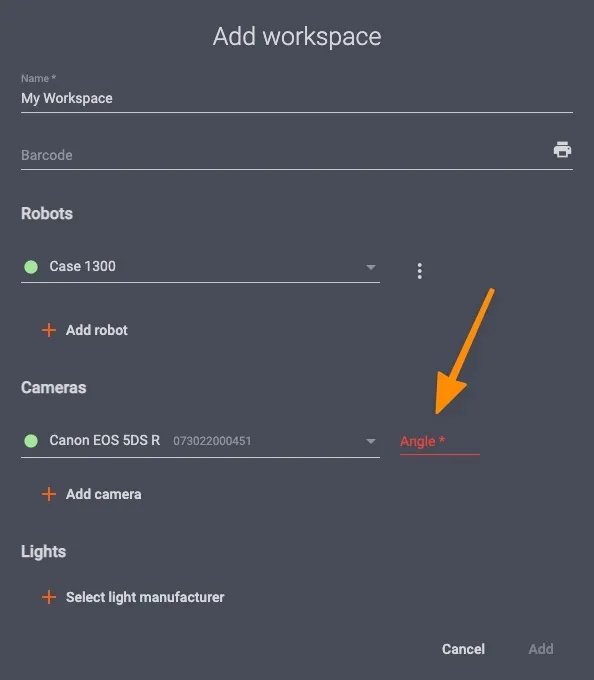
( ! ) - Ajustar el ángulo para robots sin capacidad de oscilación es necesario para que ciertas características como el autocentrado funcionen.
( * ) - Consulta la lista completa de cámaras compatibles con PhotoRobot.
Configurar luces
Los sistemas de iluminación compatibles con PhotoRobot incluyen dos tipos de luces: luces estroboscópicas de FOMEI y Broncolor, o cualquier luz LED compatible con DMX. Para configurar una configuración de iluminación en el menú del espacio de trabajo, vaya a Luces y agregue luces compatibles en Seleccionar fabricante de luz.
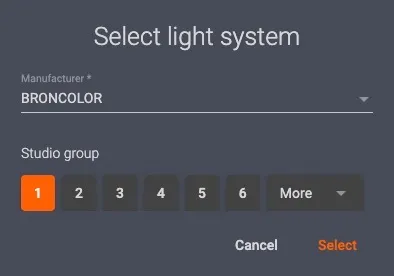
Luces estroboscópicas - Broncolor
Para configurar las luces Broncolor, seleccione primero BRONCOLOR y, a continuación, elija entre el grupo de luces de Studio sobre el que desea controlar:
Luces estroboscópicas - FOMEI
Para las luces de FOMEI, los usuarios tienen dos opciones de control:
Transceptor FOMEI LAN (método preferido)
Para controlar las luces a través del transceptor FOMEI LAN, asegúrese primero de que esté en línea y conectado a su red.
A continuación, selecciona LAN. Luego, debajo de LAN en el menú desplegable, selecciona Fomei LAN Transceptor.

Dongle USB FOMEI (Legacy)
También es posible controlar las luces con el dongle WiFi de FOMEI conectado directamente a su computadora a través de USB.
( ! ) Tenga en cuenta que este método ya no se recomienda. Esto se debe al hecho de que requiere que se instalen controladores adicionales en su computadora. FOMEI ya no es compatible con los sistemas MacOS más nuevos.
Luces LED - DMX
Para controlar cualquier luz LED compatible con el protocolo DMX, conecte las luces a través de un cable RJ45 o USB al robot.
A continuación, puede seleccionar el fabricante de luz DMX.
Más tarde, creará una luz individual en la pantalla Capturar:
Para cada luz, puede configurar dos canales:

- El canal de brillo permite controlar el nivel de brillo de la luz seleccionada.
- El canal de color es compatible con algunas luces y permite el ajuste de los niveles de color.


Serie EOS Rebel


Serie EOS DSLR


Serie mirrorless EOS M


Serie PowerShot


Primer plano / Portátil

La serie EOS Rebel de Canon ofrece cámaras DSLR para principiantes con una calidad de imagen sólida, controles intuitivos y funciones versátiles. Ideales para los entusiastas de la fotografía, estas cámaras proporcionan un enfoque automático fiable, pantallas táctiles de ángulo variable y grabación de vídeo Full HD o 4K.
Conexión
Resolución (MP)
Resolución
La serie EOS DSLR de Canon ofrece imágenes de alta calidad, enfoque automático rápido y versatilidad, lo que la hace ideal tanto para la fotografía como para la producción de vídeo.
Conexión
Resolución (MP)
Resolución
La serie mirrorless EOS M de Canon combina un diseño compacto con un rendimiento similar al de una cámara réflex. Con lentes intercambiables, enfoque automático rápido y sensores de imagen de alta calidad, estas cámaras son ideales para viajeros y creadores de contenido que buscan portabilidad sin sacrificar la calidad de la imagen.
Conexión
Resolución (MP)
Resolución
La serie PowerShot de Canon ofrece cámaras compactas y fáciles de usar para fotógrafos ocasionales y entusiastas. Con modelos que van desde simples cámaras de apuntar y disparar hasta cámaras con zoom avanzado, brindan comodidad, calidad de imagen sólida y funciones como estabilización de imagen y video 4K.
Conexión
Resolución (MP)
Resolución
Las cámaras de mano y primeros planos de Canon están diseñadas para fotografía y vídeo detallados y de cerca. Compactos y fáciles de usar, ofrecen un enfoque de precisión, imágenes de alta resolución y capacidades macro versátiles, perfectas para vlogs, fotografía de productos y primeros planos creativos.


