PhotoRobot Cube V5 / V6 / Compact Manual de usuario
Este manual de usuario proporciona instrucciones técnicas sobre la instalación, conexión y uso del PhotoRobot Cube V5 / V6 / Compact. Incluye instrucciones sobre cómo instalar el robot Cube como soporte giratorio para el torso del maniquí. El manual tiene como objetivo apoyar a los clientes de PhotoRobot durante el ensamblaje de su dispositivo, su primer uso y en la incorporación de operadores de línea de producción.

Nota: La primera instalación de un dispositivo PhotoRobot siempre debe ser realizada por una autoridad autorizada de PhotoRobot. Las autoridades autorizadas para instalar PhotoRobot son un distribuidor aprobado o un representante del propio fabricante.
Importante: Siempre consulte primero la Información e instrucciones de seguridad de PhotoRobot, además del manual proporcionado específicamente con su dispositivo, antes de cualquier autoinstalación o primer uso.
Cube V5 / V6 / Compacto Primer uso e instalación
¡Gracias y felicitaciones por su compra de PhotoRobot Cube! Su dispositivo representa décadas de experiencia profesional, conocimientos e innovación en fotografía automatizada. El diseño de cada robot es pensando en usted. Mientras tanto, el software está en constante desarrollo, adaptándose a las necesidades únicas y beneficiando a todo el ecosistema de PhotoRobot con cada actualización.
Bienvenido a PhotoRobot. Utilice esta documentación técnica sobre Cube V5 / V6 / Compact PhotoRobots para familiarizarse con la tecnología y para obtener instrucciones que detallan el montaje y el primer uso de la solución.
1. Descripción del producto - Cube V5 / V6 / Compact
Los dispositivos PhotoRobot Cube V5 / V6 / Compact son uno de los robots de estudio fotográfico más versátiles. Cada Cube puede funcionar de forma independiente o en combinación con otros PhotoRobot, y cuenta con configuraciones para 3 modos de operación diferentes. El Cubo funciona como una plataforma de fotografía giratoria, en modo de suspensión de objetos, y como un soporte giratorio para el torso del maniquí.

Las características clave del PhotoRobot Cube incluyen:
- Uso independiente o en combinación con PhotoRobot compatibles
- Configuración rápida como plataforma giratoria 360 o en modo de suspensión de objetos
- Soporte para un soporte de torso de maniquí o plataforma giratoria
- Compatible con maniquíes fotográficos de diferentes tipos y tamaños
- Disponible en versiones Cube V5, V6 y Compact para una mayor versatilidad
1.1. Descripción general del dispositivo - Cube V5 / V6 / Compact
Cube V5, Cube V6 y Cube Compact de PhotoRobot están operativos en tres configuraciones diferentes. Las configuraciones estándar implican el uso del dispositivo como una plataforma de fotografía giratoria o para suspender objetos en el aire para fotos. Alternativamente, es posible configurar el dispositivo como un soporte giratorio para montar el torso de un maniquí.
a) Configuración de la plataforma giratoria / foto 360:

b) 360 / Modo de suspensión rotativa:

c) Soporte de torso de maniquí giratorio:

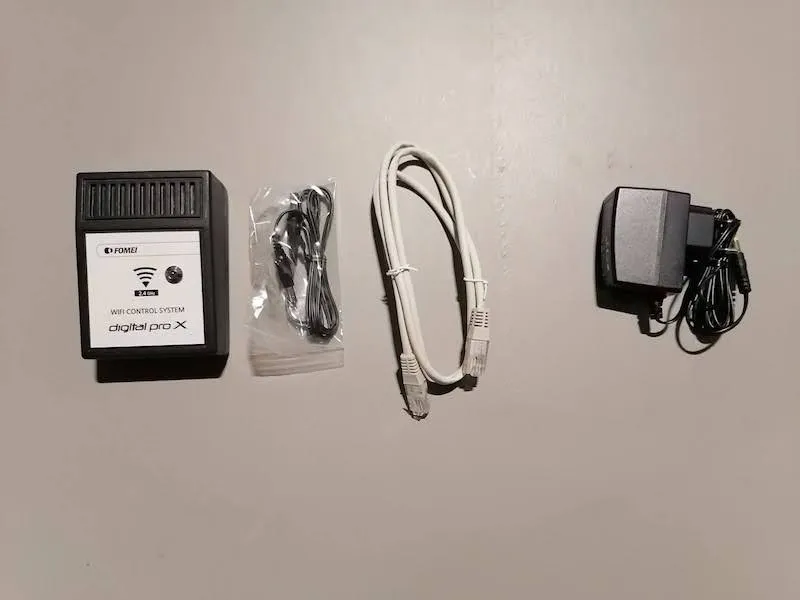
Nota: La unidad de control del Cube V5 y el Cube V6 son un componente separado pero integral de los dispositivos. El Cube Compact tiene una unidad de control integrada dentro de la máquina.
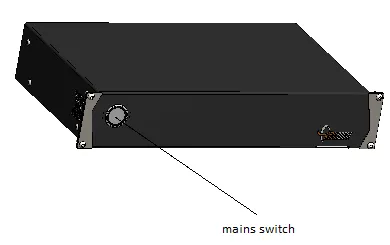
- La imagen de arriba muestra la unidad de control para el Cube V5 / Cube V6.
1.2. Parámetros técnicos de Cube Compact
Existen los siguientes parámetros técnicos para el Cube Compact.
- Peso: 26,21 kg
- Dimensiones: 337,5 x 373,5 x 209,5 mm
- Fuente de alimentación: 100 - 230 V, 50 HZ, fusible T1.6 A (230 V), T3.15 A (115 V)
- Capacidad de carga: 130 kg para montaje inferior y superior
- Par del eje de salida: 143,5 Nm
- Velocidad: 0 -17 1.min-1
1.3. Accesorios compactos Cube
El Cube Compact tiene las siguientes piezas y accesorios.
a) Percha:

b) Base inferior:

c) Base superior:
d) Pies de máquina:

e) Placa:

f) Portal:

1.4. Descripción general de la instalación y el uso de Cube Compact
Además de los accesorios Cube Compact, existen múltiples configuraciones para la instalación y el uso del Cube Compact. Estos incluyen las siguientes partes de configuración y configuraciones.
a) Placa de fijación inferior (para sujetar el plato giratorio del dispositivo o el sistema de montaje):
b) Plataforma giratoria independiente sujeta (fijada al suelo para mayor estabilidad):


Nota: En esta configuración, hay una placa de 95 cm con una base que se monta en una superficie de piso estable. Esto estabiliza la máquina cuando está en uso, funcionando para evitar que se vuelque. Sus casos de uso incluyen la presentación de objetos de tamaño pequeño y mediano, hasta un tamaño máximo de 60 a 65 cm.
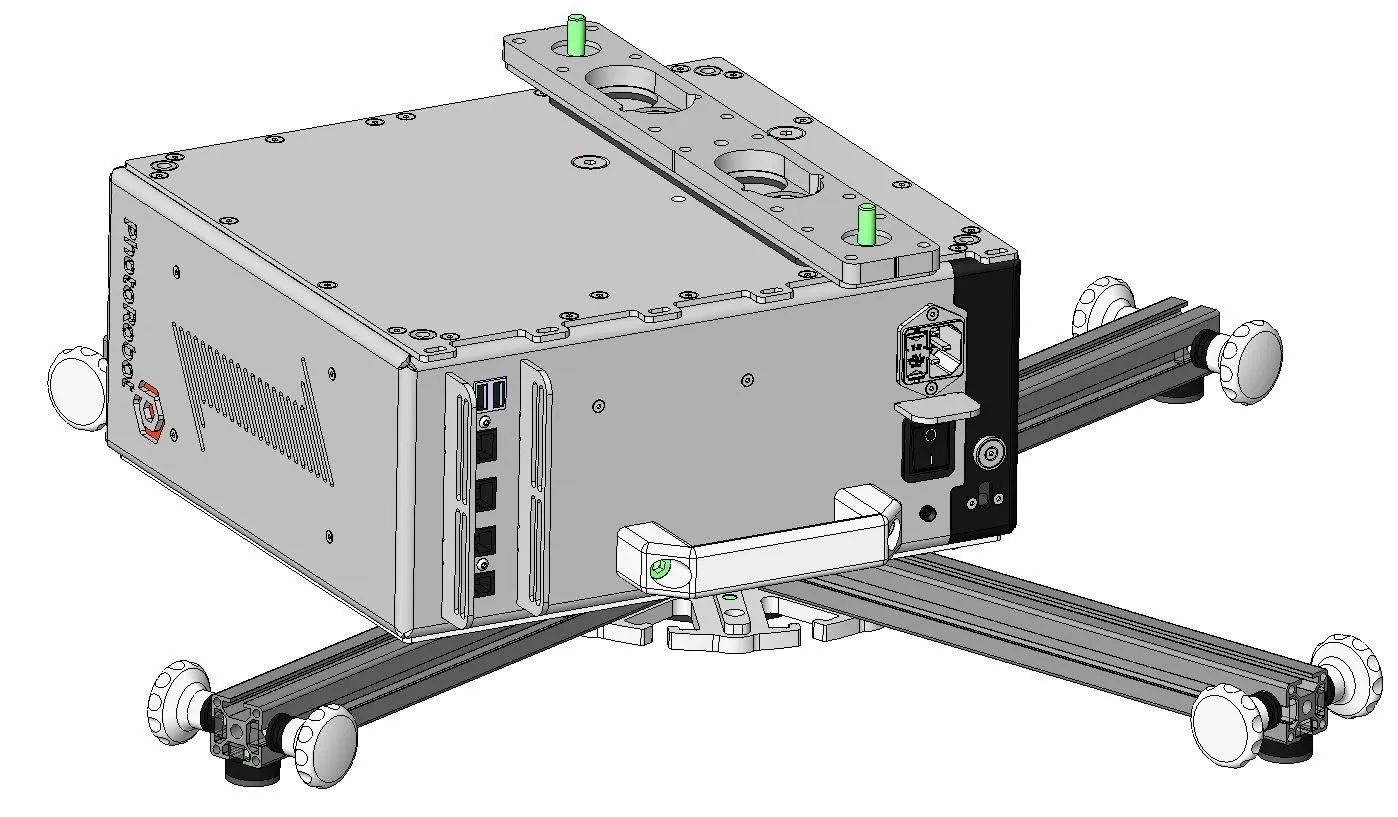
c) Plataforma giratoria independiente (con pies de dispositivo en uso):
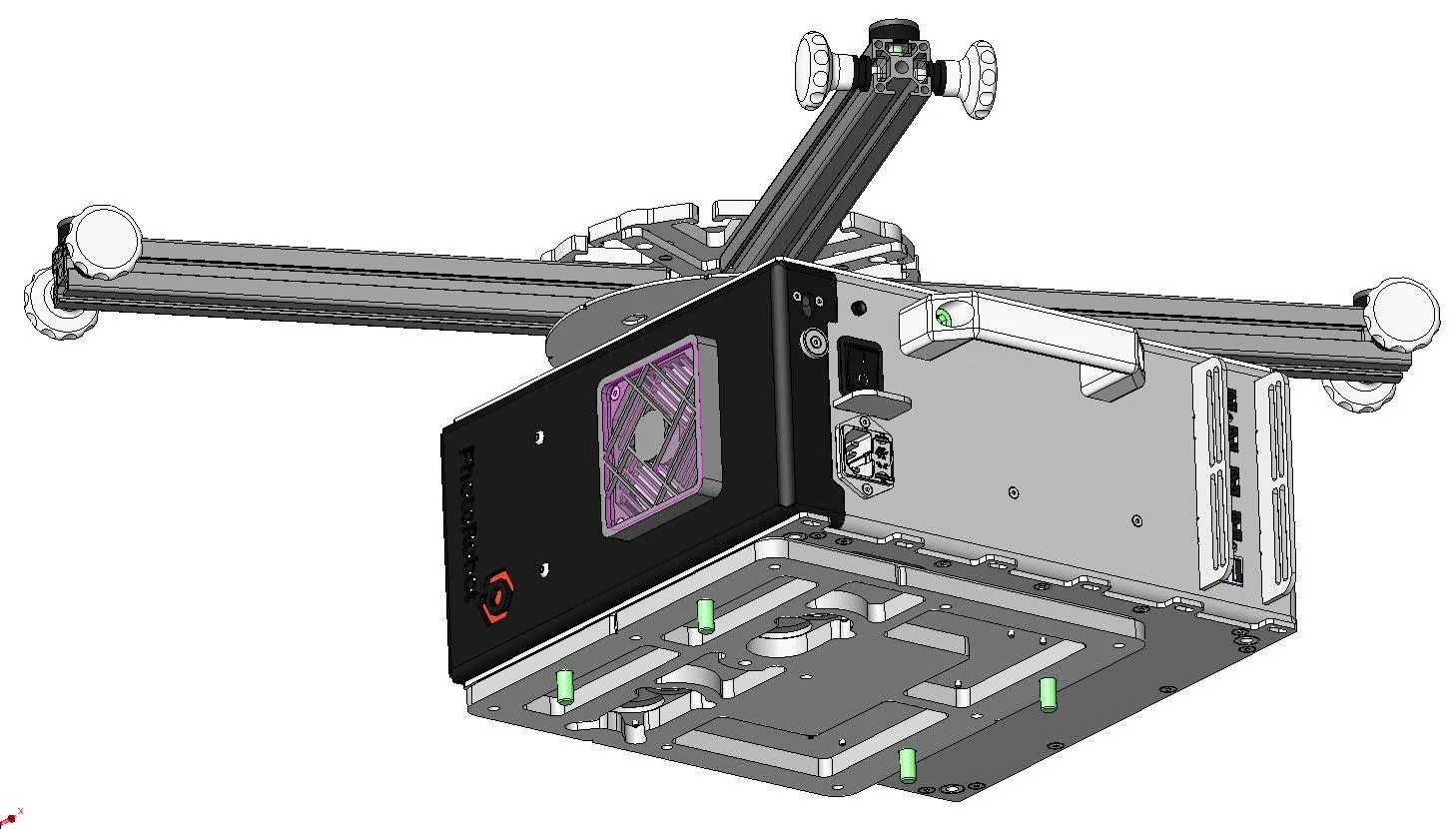
d) Modo de suspensión giratoria 360 (montaje al revés en un portal superior):




1.5. Parada de emergencia compacta Cube
Para realizar una parada de emergencia, desconecte el dispositivo de la red eléctrica tirando del cable de alimentación de la toma de corriente.
1.6. Mantenimiento de Cube V5 / V6 / Compact
Tenga en cuenta que es necesario mantener el dispositivo limpio y en un ambiente seco, climatizado y con una temperatura constante. Elimine el polvo solo con un paño húmedo y no use productos químicos ni solventes para ninguna limpieza.
Por diseño, el equipo debe estar sujeto a inspecciones y revisiones periódicas de acuerdo con la legislación local. Una vez finalizado su ciclo de vida, el equipo eléctrico debe eliminarse adecuadamente mediante la entrega al sistema de recogida de residuos electrónicos dictado por la legislación local.
2. Primer uso - PhotoRobot Cube V5 / V6 / Compacto
Antes de usar PhotoRobot por primera vez, es necesario comprender el concepto detrás de la tecnología. PhotoRobot es una revolucionaria solución todo en uno para la automatización de la fotografía de productos y objetos. Desde una perspectiva técnica, es una unidad modular que consta de hardware y software. Por lo tanto, es necesario que PhotoRobot esté conectado a través de la misma red que la computadora que lo opera. La red también debe tener una conexión a Internet para acceder a los servicios de PhotoRobot, que se ejecutan en la nube. A continuación, existen los siguientes requisitos que siempre deben cumplirse.
- Debe haber una unidad de control PhotoRobot conectada a la red local.
- Se necesita una computadora para ejecutar la GUI del servicio o el software del operador llamado _Controls.
- El ordenador debe estar conectado a la misma red que la unidad de control PhotoRobot.
- La red debe estar conectada a Internet.
Después de asegurar la conexión de PhotoRobot a la computadora y la red local, verifique los parámetros del sistema de distribución de electricidad (por ejemplo, voltaje y frecuencia).
Luego, verifique la configuración de alimentación de la unidad de control. Debe cumplir con todos los parámetros del sistema de distribución de electricidad. Si la configuración de la unidad de control no cumple, consulte la siguiente sección sobre Configuración de alimentación de la unidad de control.
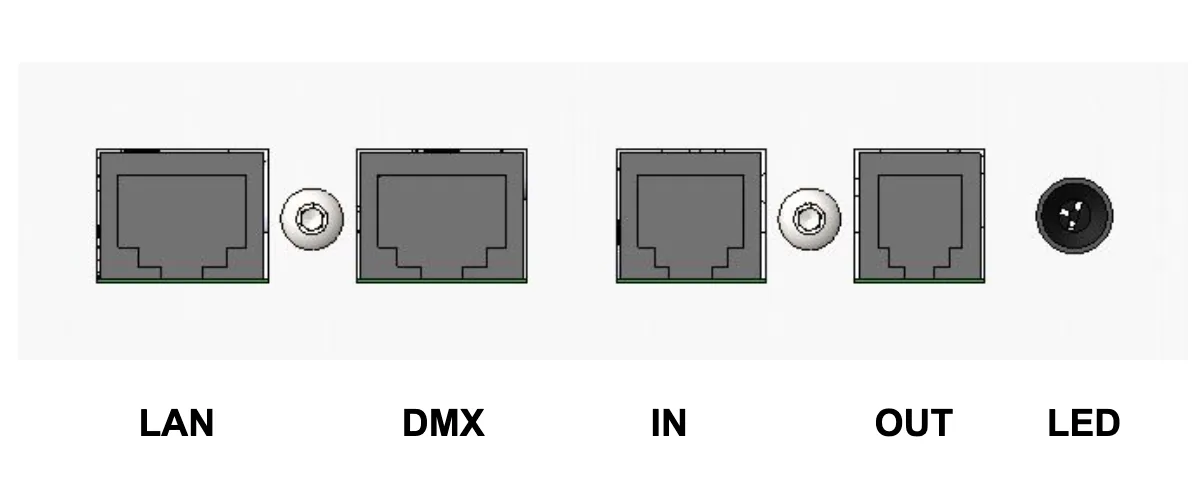
Si cumple con los requisitos, proceda conectando la unidad de control a la red a través de un cable ethernet.
Nota: Para los modelos Cube V5 / V6, la unidad de control es un dispositivo separado. Busque el conector RJ45 en la parte posterior de la unidad de control. El Cube Compact tiene la unidad de control integrada en la máquina. Busque el conector RJ45 en la parte posterior del robot Cube.
2.1. Configuración de la potencia de la unidad de control
Para verificar la configuración de alimentación de la unidad de control, la unidad de control del modelo anterior tiene un selector de voltaje manual en la parte posterior del dispositivo.

Alternativamente, el modelo más nuevo de la unidad de control no tiene selector de voltaje y tiene un rango funcional de operación de 110 V a 240 V.
Si no está seguro de la configuración de alimentación de la unidad de control, comuníquese con el soporte técnico de PhotoRobot para obtener ayuda de un técnico especializado de PhotoRobot.
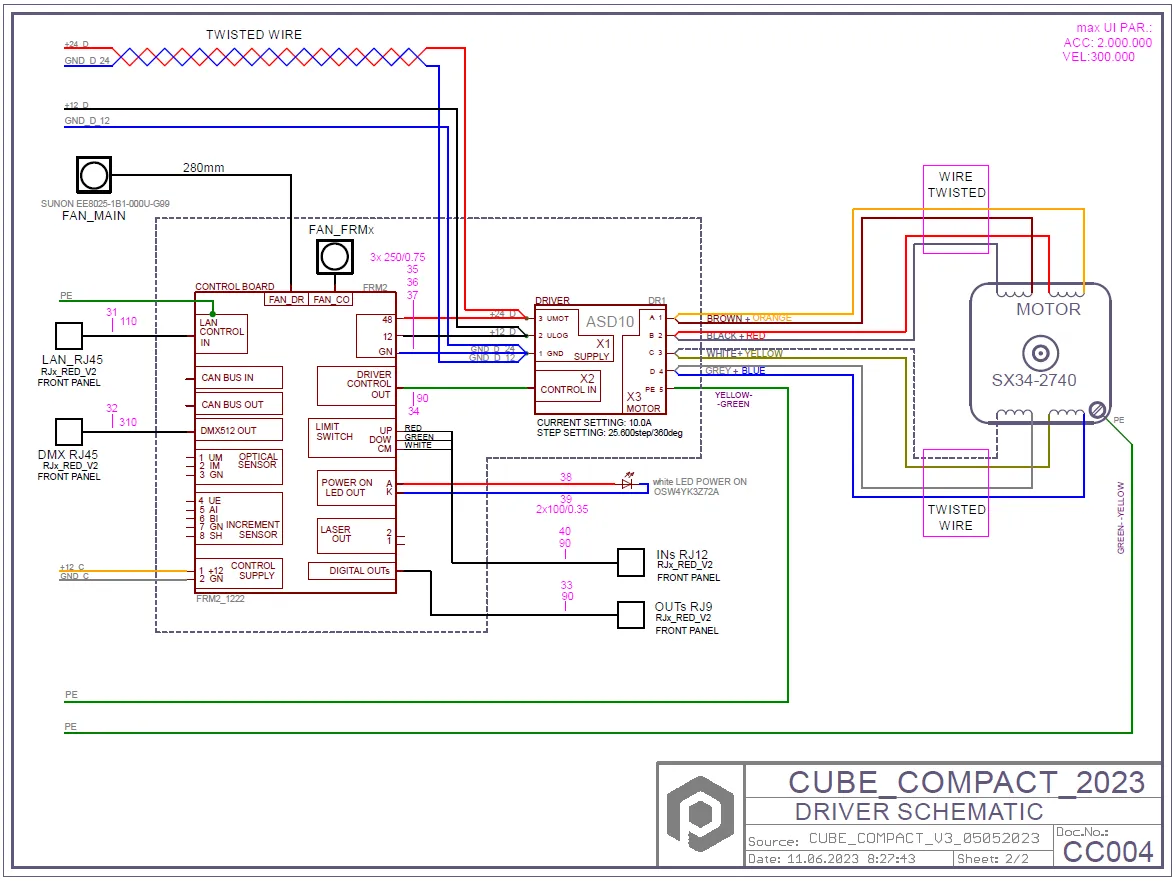
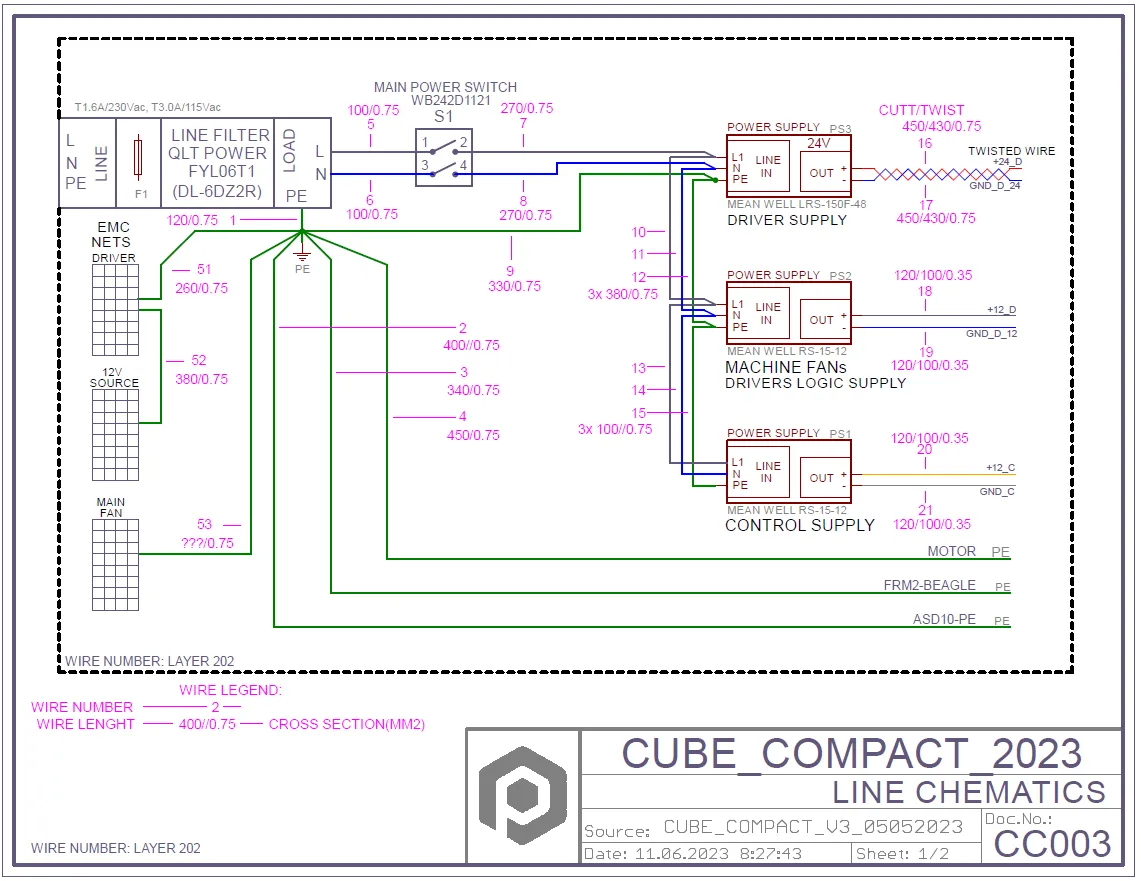
2.2. Diagrama eléctrico compacto del cubo
2.3. Configuración de red
Para configurar la red para que se comunique correctamente con PhotoRobot, se deben cumplir los siguientes requisitos en la red.
- Un servidor DHCP en la red es obligatorio.
- Se debe permitir la comunicación de los puertos TCP 7777, 7778.
- Se deben permitir las transmisiones UDP en el puerto 6666
- La conexión a Internet es obligatoria.
- *. photorobot.com acceso debe estar permitido.
- as-unirobot.azurewebsites.net se debe permitir el acceso.
- Se recomienda la conexión por cable de PhotoRobot a LAN.
- Consulte los requisitos previos detallados de la red de PhotoRobot para obtener más información si es necesario.
- Conecte el enchufe a la toma de corriente.
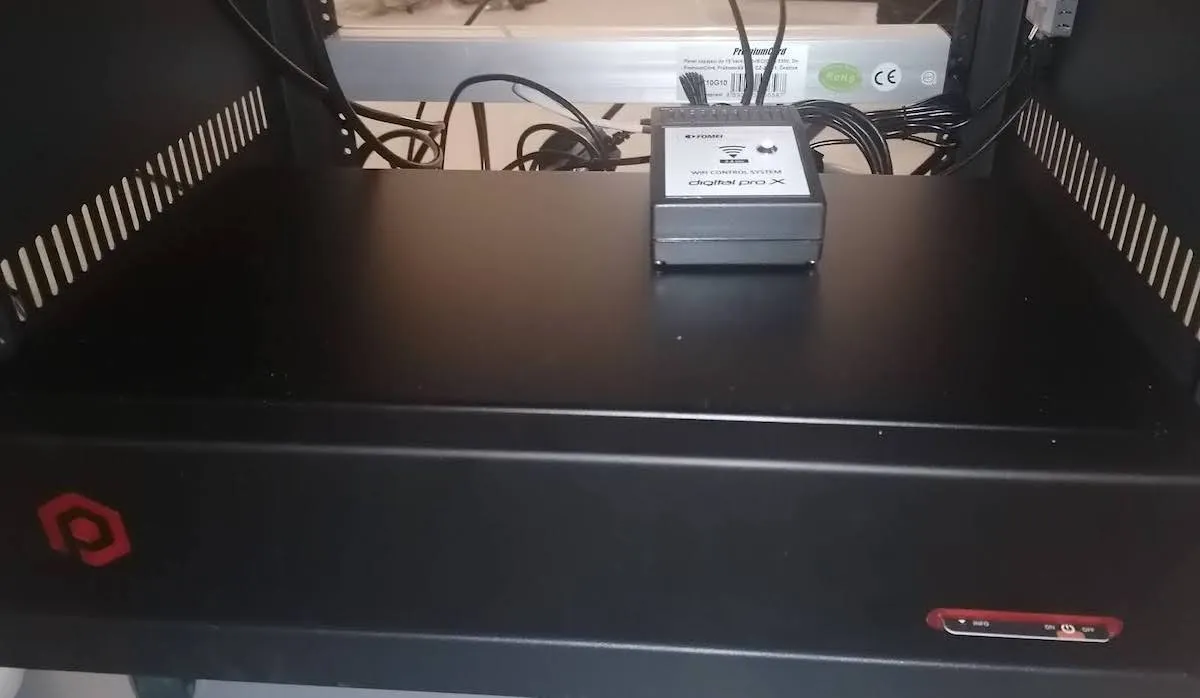
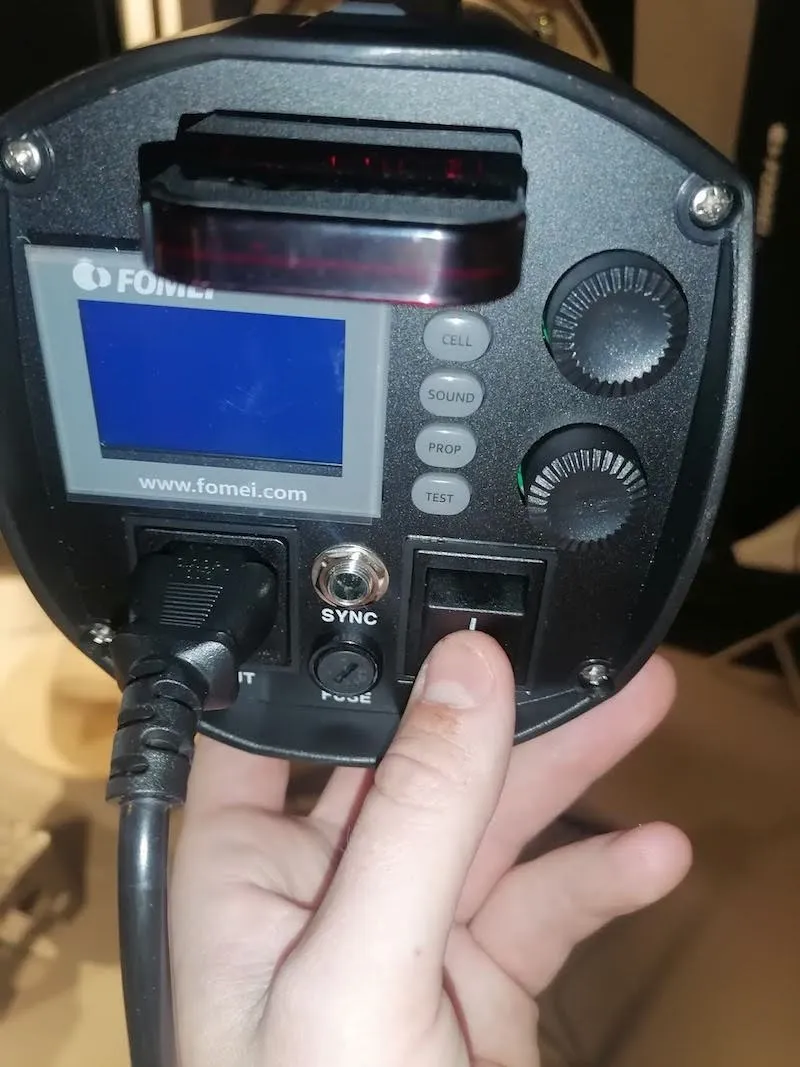
A continuación, presione el interruptor de red en la unidad de control para el Cube V5 / V6 (o en la parte posterior del Cube Compact). La luz de estado cambiará de parpadeante a luz continua para indicar cuándo está lista para funcionar.
2.4. Encuentre la dirección IP de PhotoRobot en LAN
Tras una configuración adecuada de la red, es necesario buscar e identificar la dirección IP de PhotoRobot en la LAN. Para ello, la aplicación PhotoRobot Locator está integrada directamente en CAPP para facilitar la búsqueda e identificación de las Unidades de Control en la red. Asegúrate de usar la versión más actualizada de CAPP para acceder a esta función.
Luego, para identificar un robot en la red directamente dentro de CAPP, abre la versión local de CAPP, ve a Configuración y haz clic en Robots / Unidades de control.

El menú de Robots / Unidades de Control muestra columnas con Nombre, Red, Unidad, Versión, Descubierto e Identificar para cada robot. Si el punto a la izquierda del nombre del robot es verde, está en línea. Al hacer clic en el campo robot, se abrirá la interfaz web del robot. Esto también hará que la luz LED de la unidad de control del robot parpadee en verde para facilitar su identificación.
Si el cliente requiere descarga externa de la aplicación, PhotoRobot Locator también está disponible para descarga en iOS dentro de PhotoRobot Account Downloads.

Nota: La versión para Android de PhotoRobot Locator ha sido descontinuada.
Alternativamente, existe la utilidad de línea de comandos FRFind para MacOS o Windows para buscar en la red e identificar Unidades de Control PhotoRobot. Encuentra enlaces para descargar FRfind también en la página de Descargas de Cuentas de PhotoRobot.
2.5. Pruebas básicas - Cube V5 / V6 / Compact
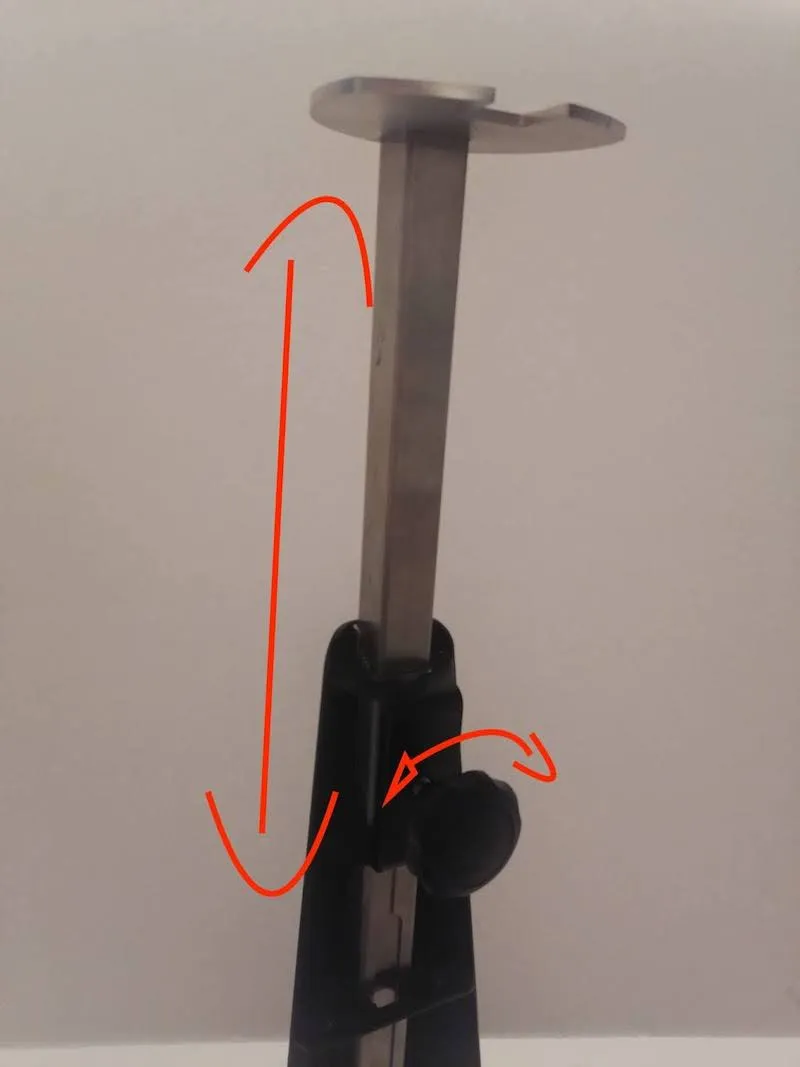
Para probar el Cube V5 / V6 / Compact, a continuación, abra un navegador web e ingrese la dirección IP asociada con su PhotoRobot en formato URL. Por ejemplo, ingrese: https://11.22.33.44 (aunque tenga en cuenta que esta dirección es solo un ejemplo). Si tiene éxito, se iniciará una interfaz de usuario básica.

- Encienda los motores (flecha 1 arriba) e intente operar cualquier parte móvil del robot (flecha 2 arriba). Si el robot se mueve según sus instrucciones, está listo para usar su dispositivo PhotoRobot con regularidad.
3. Conjunto Cube V5 / V6 y soporte de torso de maniquí
Al ensamblar los modelos Cube V5 o Cube V6, tenga en cuenta que es necesario ensamblar la unidad de control y el bastidor separados. Este no es el caso del Cube Compact. Si usa el Cube Compact, continúe con la sección sobre el ensamblaje del fondo de papel.
3.1. Montaje del rack HD y la unidad de control (V5 / V6)
3.1.1. Para montar la unidad de control separada del Cube V5 y el Cube V6, comience con el montaje del bastidor. Para ello, siga las instrucciones del manual adjunto a la caja de estantería en el momento de la entrega.

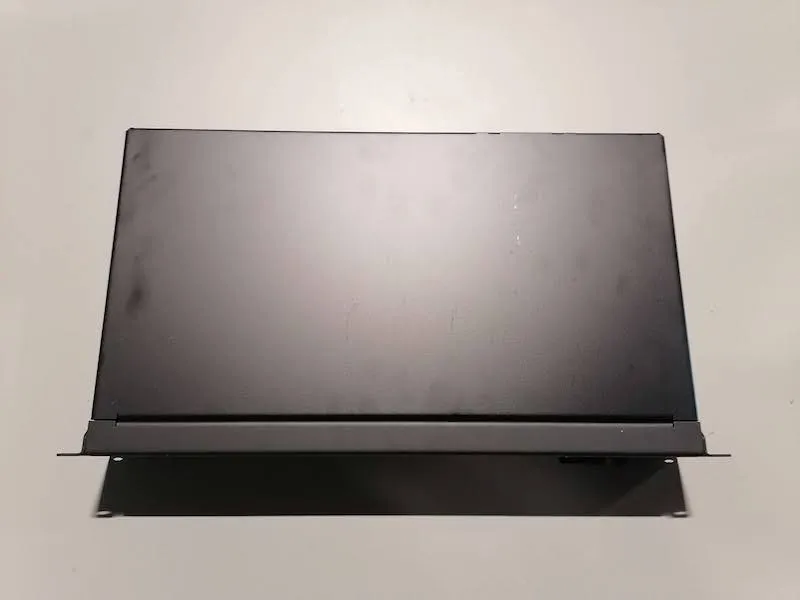
3.1.2. A continuación, localice y desembale la unidad de control de su caja de envío de caja.

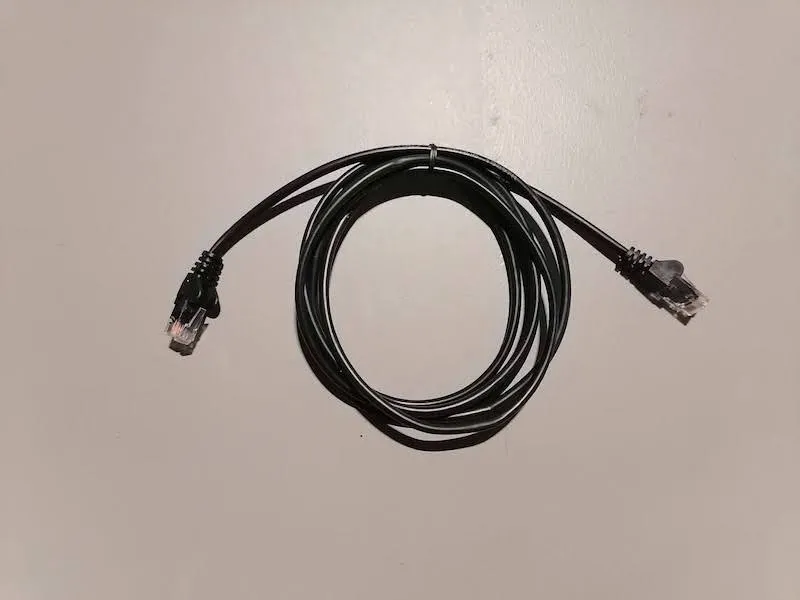
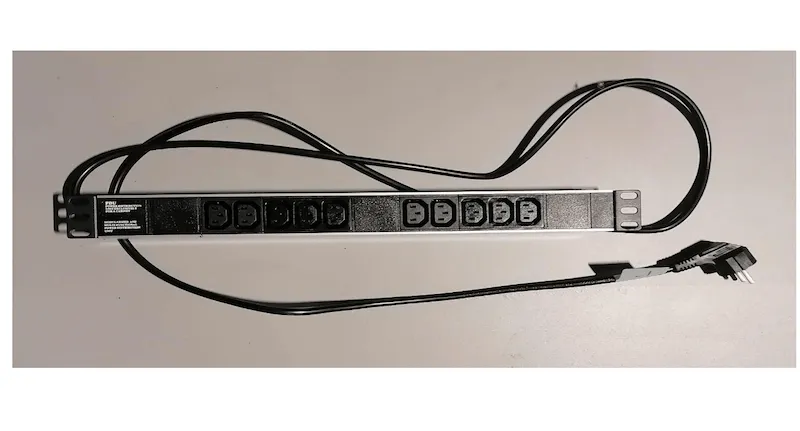
3.1.3. Luego, prepare los siguientes cables: el cable de alimentación (1 metro de longitud), el cable del obturador, el cable del motor y el cable ethernet (2 metros de longitud).
a) Cable de alimentación (1 metro de longitud):

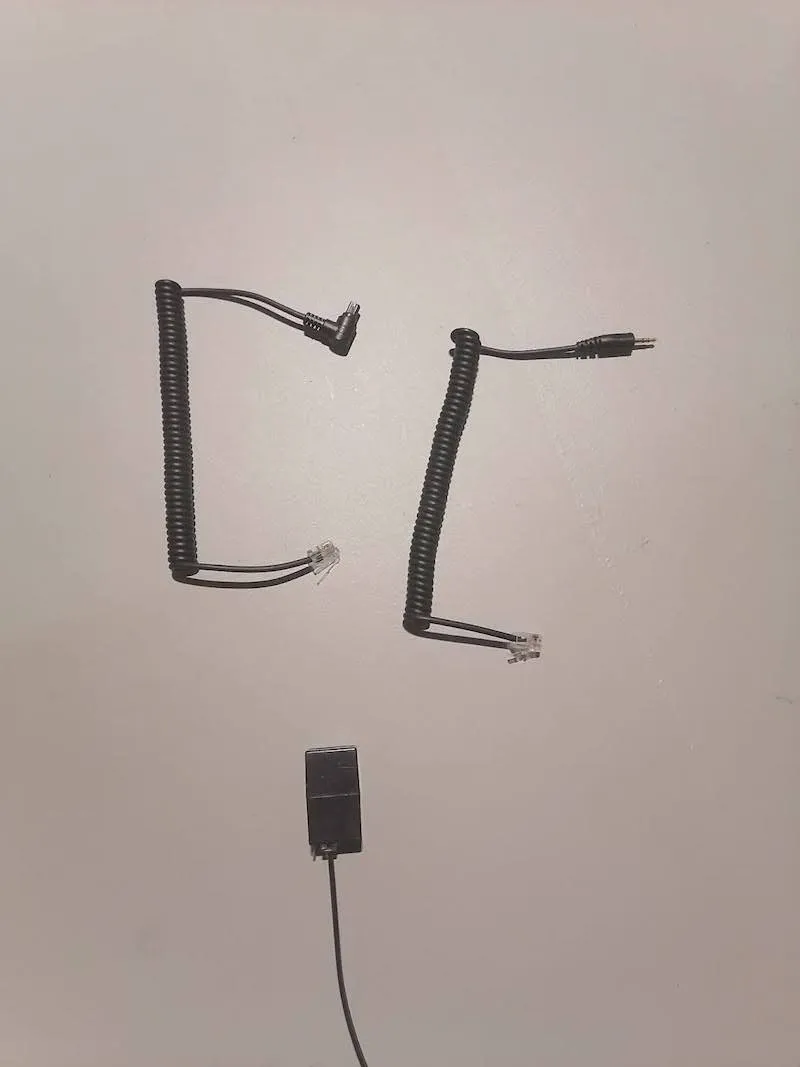
b) Cable del obturador (1 metro de longitud):

c) Cable del motor:

d) Cable Ethernet (2 metros de longitud):
3.1.4. Coloque cada cable preparado en el paso anterior en el bastidor.
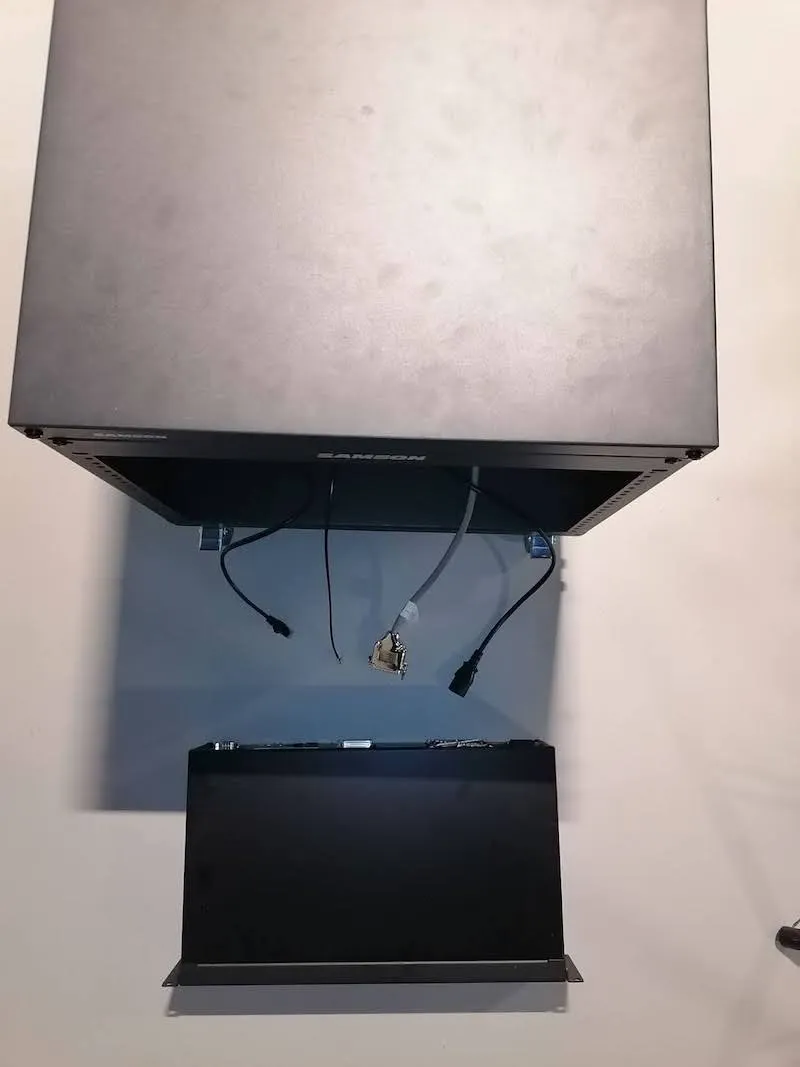
3.1.5. Conecte los cables de los pasos anteriores a la unidad de control.

Importante: El cable del motor debe sujetarse firmemente con los dos tornillos del conector. El cable del obturador se conecta al puerto OUT de la unidad de control.
3.1.6. Inserte la unidad de control en la caja del bastidor y apriete los tornillos para sellarla.
3.2. Montaje de accesorios y conexiones
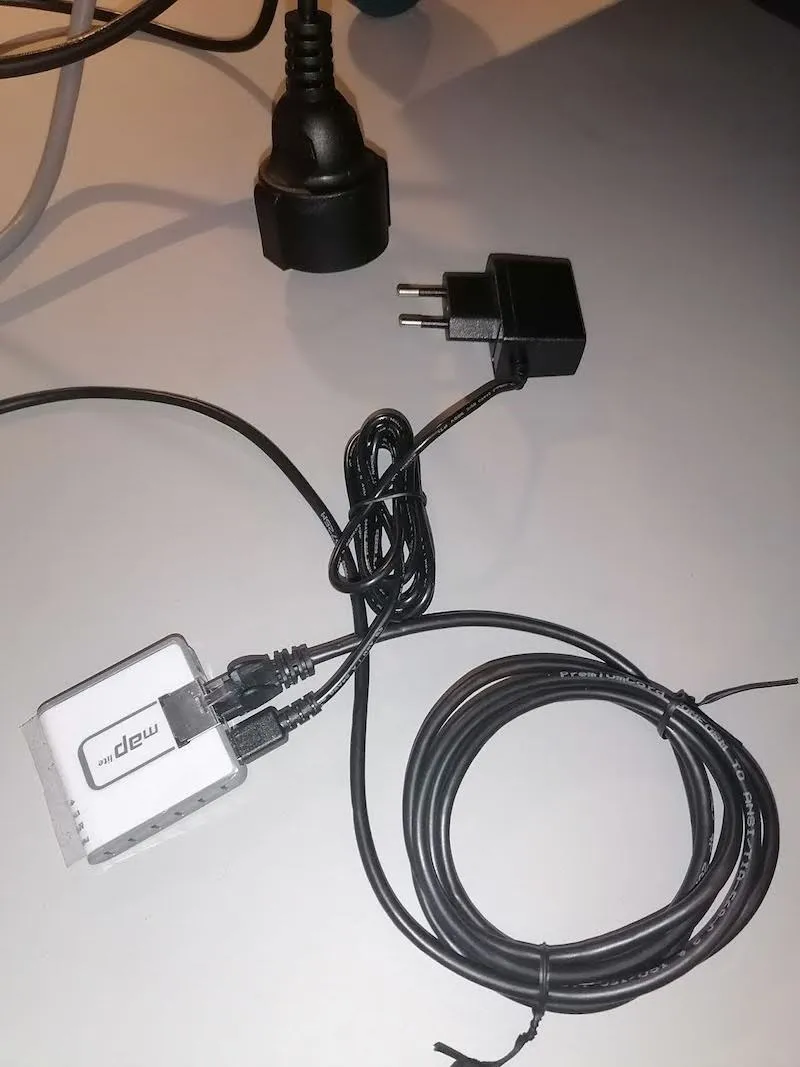
3.2.1. Para conectar todos los accesorios para el Cube V5 / Cube V6, comience desembalando el enrutador de la caja de cartón y luego montando los soportes del bastidor. A continuación, conecte los cables de alimentación o el adaptador (según el tipo de enrutador) e inserte el enrutador en la caja del bastidor antes de atornillarlo.

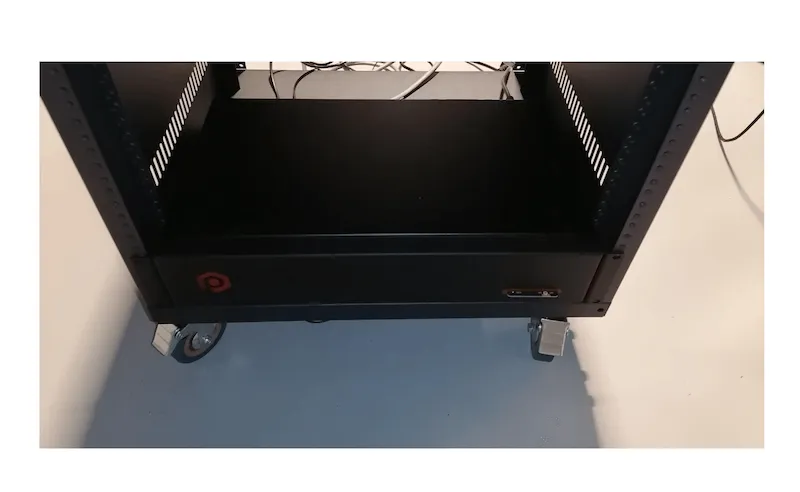
3.2.2. Asegure el enchufe múltiple de alimentación en la parte inferior en la parte posterior del bastidor sujetándolo con tornillos.

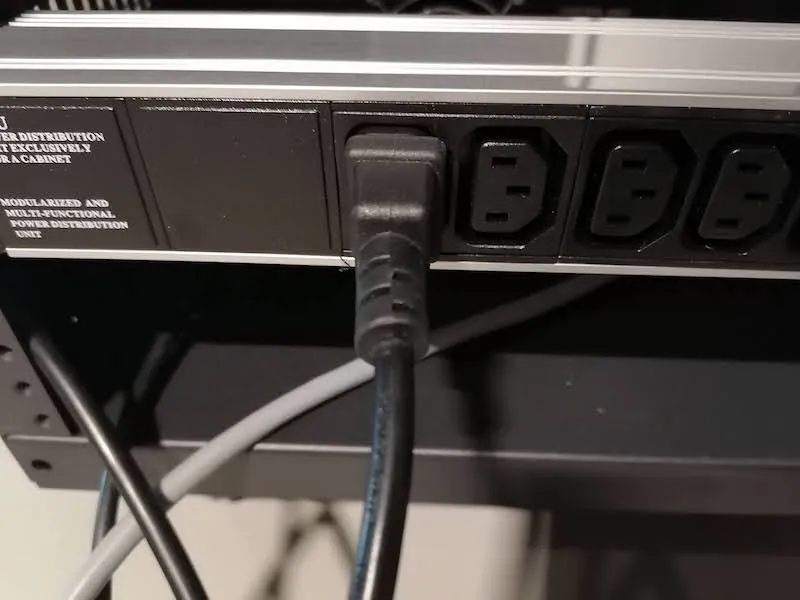
3.2.3. Si el enrutador entregado tiene un adaptador de corriente, busque la interfaz del adaptador de corriente y conéctela a cualquier conector de enchufe múltiple de alimentación.



3.2.4. Busque el extremo libre del cable de alimentación de la unidad de control y conéctelo a la toma múltiple de alimentación.
3.2.5. Con el cable ethernet más largo, conecte el cable a la toma de corriente de datos de su estudio. Tenga en cuenta que, de forma predeterminada, se espera que el acceso a Internet esté disponible a través de este enchufe de pared de datos y, por lo tanto, la dirección IP se obtendrá automáticamente.


3.2.6. Conecte el otro extremo del cable ethernet al último puerto del enrutador. Utilice el puerto número 10 o el puerto número 13, según el tipo de enrutador.
3.2.7. A continuación, conecte el extremo libre del cable ethernet de la unidad de control al enrutador usando cualquier número de puerto 1-9.
3.2.8. Busque la interfaz del adaptador de corriente y conéctela a la toma múltiple de alimentación.
3.2.9. Desempaquete el módulo Wi-Fi de la caja de cartón y busque otro cable ethernet de 2 metros para conectarlo al módulo Wi-Fi. El otro extremo del cable ethernet se conecta al router mediante cualquier número de puerto 1-9.



3.2.10. A continuación, si usa luces estroboscópicas Fomei, desempaquete el convertidor Wi-Fi Fomei y el adaptador de corriente y conecte los dispositivos. Si utiliza luces Broncolor, consulte PhotoRobot - Gestión de luces Broncolor.

3.2.11. Enchufe la interfaz del adaptador de corriente en el enchufe múltiple de alimentación y luego enchufe el adaptador. El otro extremo del cable se conecta al enrutador mediante cualquier número de puerto del 1 al 9.

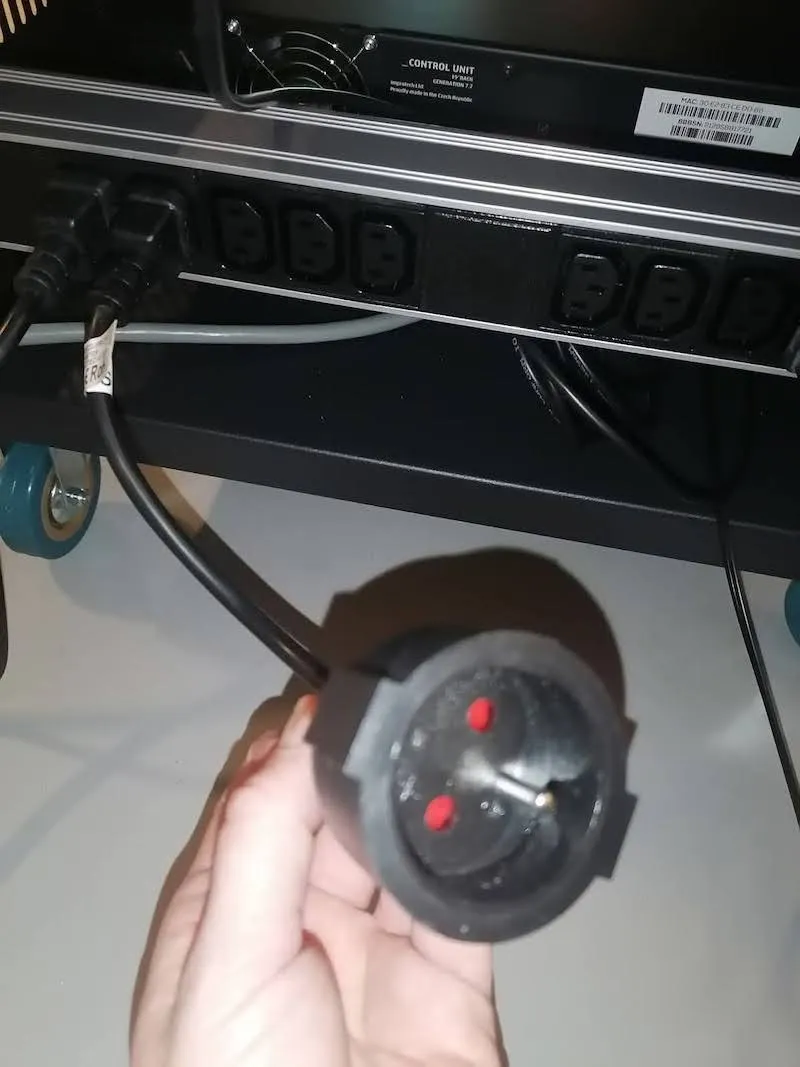
3.2.12. Conecte el enchufe de alimentación múltiple a la toma de corriente.

3.2.13. Encuentre los pases de variante del terminador del cable del obturador para su modelo de cámara y conéctelo al acoplador del cable del obturador.


3.3. Montaje del fondo de papel
3.3.1. Para montar el fondo de papel, primero busque dos soportes de luz Master LS 13-B. Luego, monte las horquillas de fijación W-2 para el juego de pernos expansores en la parte superior de cada soporte.



3.3.2. Coloque el fondo de papel con el montante colocado en las horquillas de fijación de los dos trípodes. Uno sostendrá el lado izquierdo del fondo y el otro sostendrá el lado derecho del fondo.

3.3.3. A continuación, mire la grabación de pantalla de Instalación del juego de montantes y repita los pasos del video.

3.4. Montaje del robot Cube V5 / V6
3.4.1. Para configurar el robot Cube para que soporte el soporte giratorio del torso del maniquí, comience desembalando el robot y colocando sus cuatro patas en la parte inferior del dispositivo.


3.4.2. A continuación, conecte el otro extremo del cable del motor al Cube, apretando ambos tornillos en el conector.


3.4.3. Después de conectar el dispositivo, coloque el robot Cube en el suelo en el centro del fondo blanco. Coloque el cubo a 1 metro de distancia del papel.
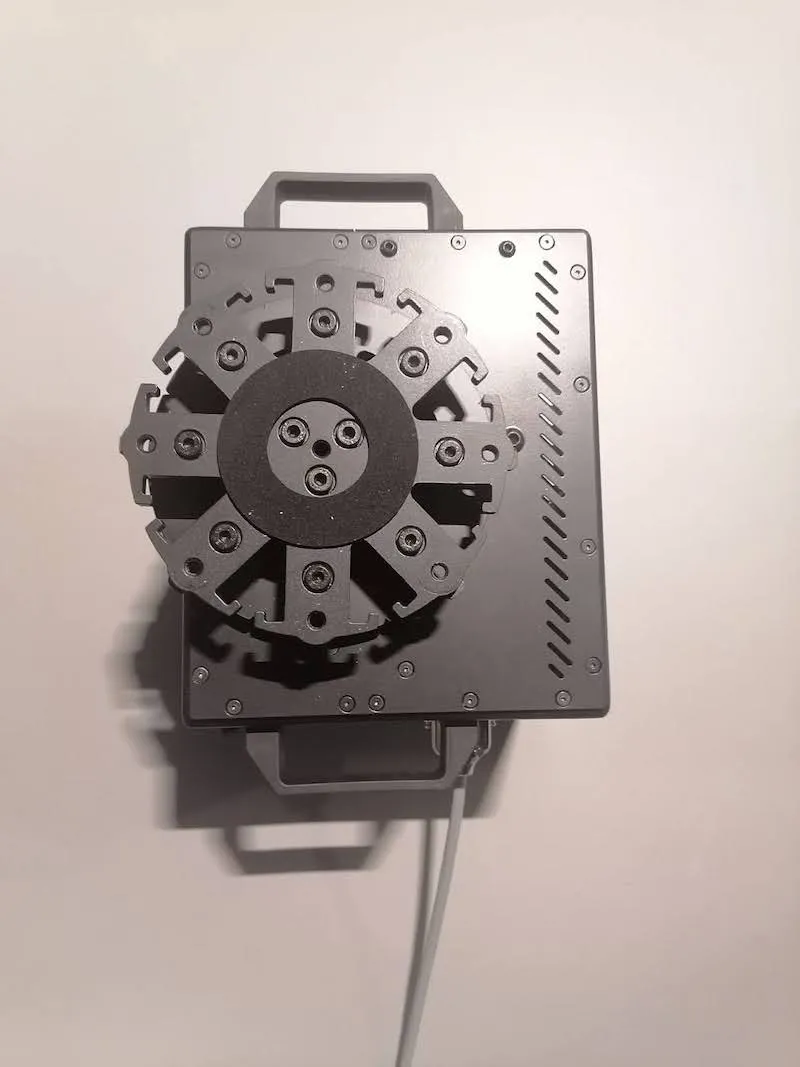

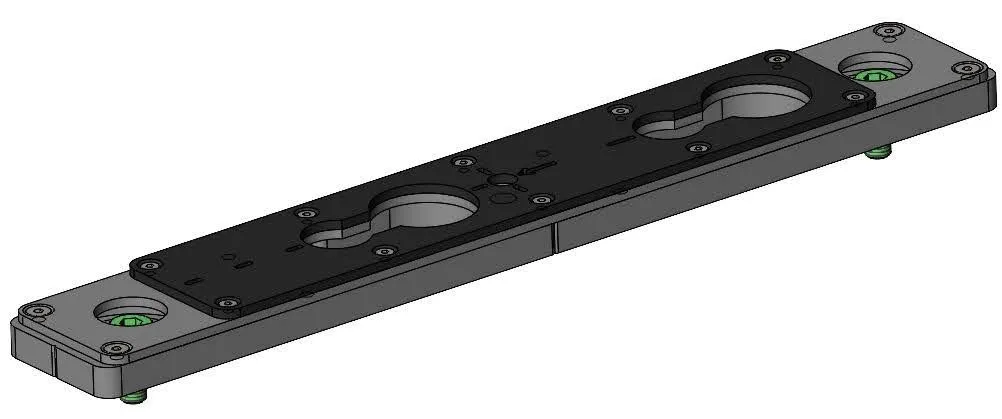
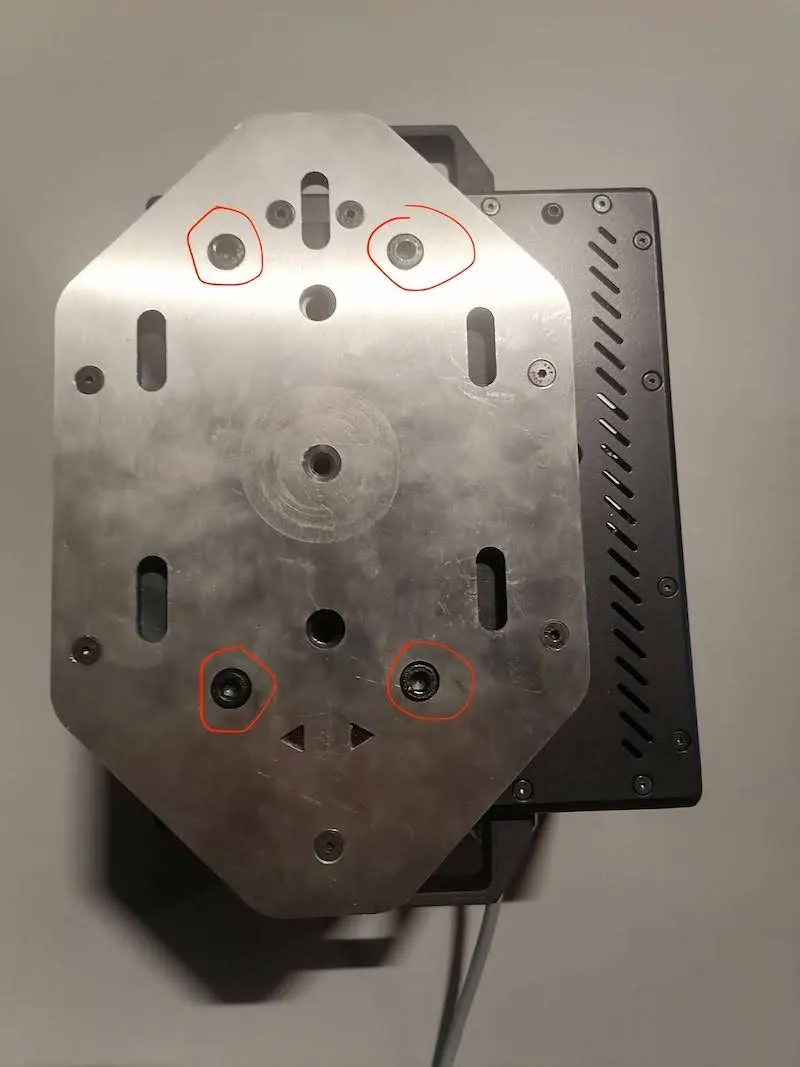
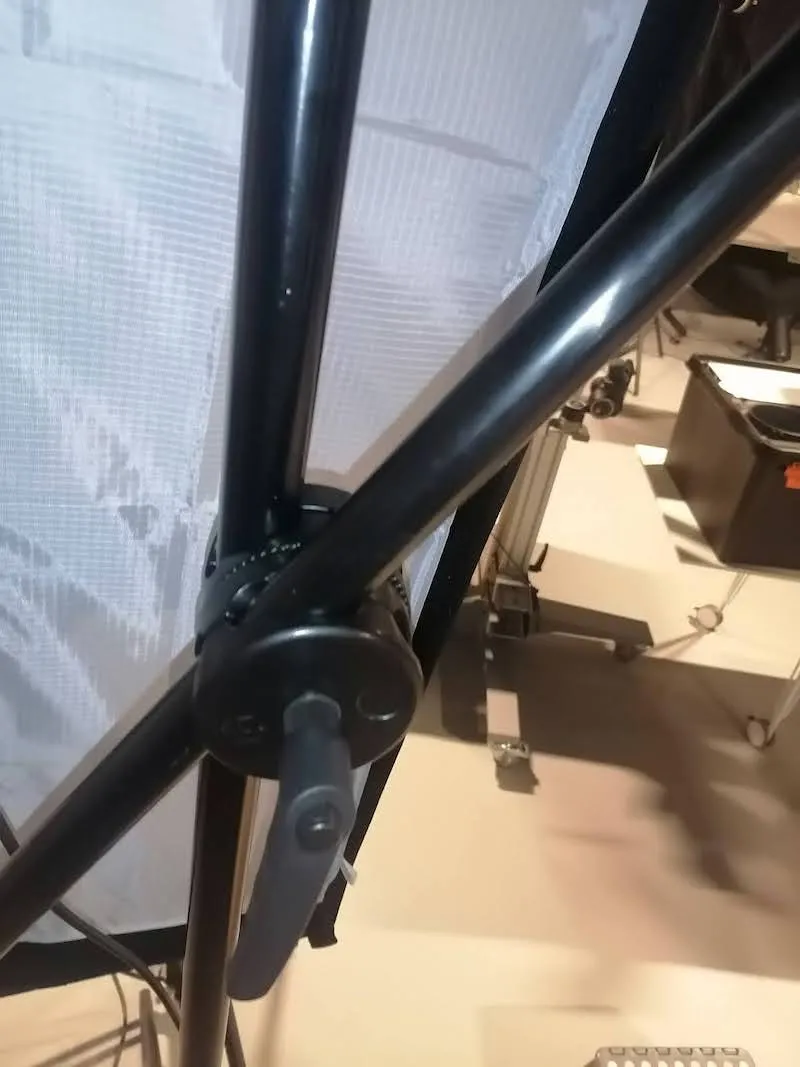
3.4.4. Coloque la placa reductora para el soporte del torso en la parte superior del robot Cube y fíjela en su lugar con los cuatro tornillos provistos.
3.4.5. Coloque el cuerpo del soporte del torso en la placa reductora y fije el soporte del torso en su lugar con el tornillo manual grande.


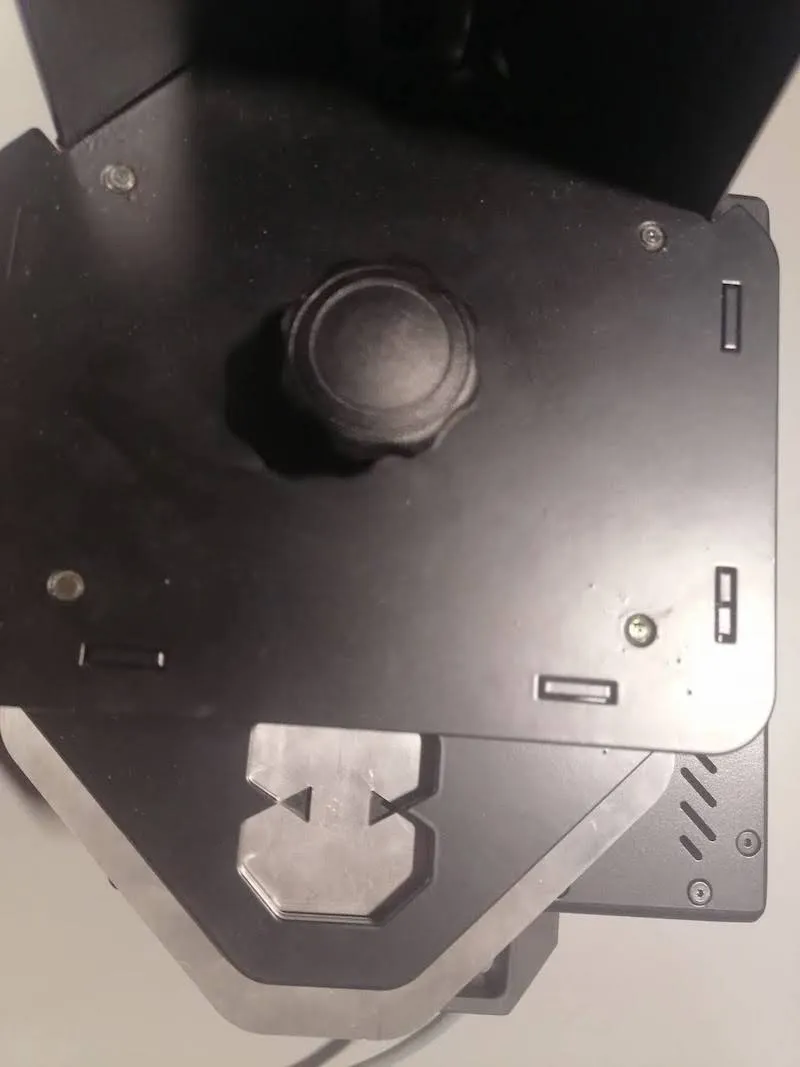
Importante: Es necesario prestar mucha atención a este paso. Asegúrese de que los símbolos triangulares de la placa de reducción sean visibles a través del soporte del torso. Esto significa que el soporte del torso se ha instalado correctamente.
3.4.6. En este punto, tenga en cuenta que la altura del torso es ajustable aflojando y apretando el tornillo de mano y deslizando la extensión hacia arriba o hacia abajo.
3.5. Configuración de las luces de flash
3.5.1. Para configurar las luces de flash con el robot Cube, primero desembale las luces de flash de la caja y luego inserte la bombilla piloto en cada linterna.


Nota: Para insertar la bombilla piloto, desenrosque con cuidado el vidrio de la tubería principal. Luego, haga lo mismo con el protector de vidrio de la bombilla principal, antes de sacar la bombilla piloto de la caja de cartón. Asegúrese de usar una servilleta o un paño cuando manipule la bombilla piloto, de lo contrario, su vida útil puede disminuir drásticamente. A continuación, inserte la bombilla piloto en la conexión en la posición exacta como en las siguientes fotos.




Cuando esté listo, recuerde volver a colocar el protector de vidrio y luego repita los pasos anteriores para ensamblar cada luz.

3.5.2. Después de configurar las bombillas piloto y reemplazar sus protectores de vidrio, conecte los cables de alimentación a todas las luces de flash.


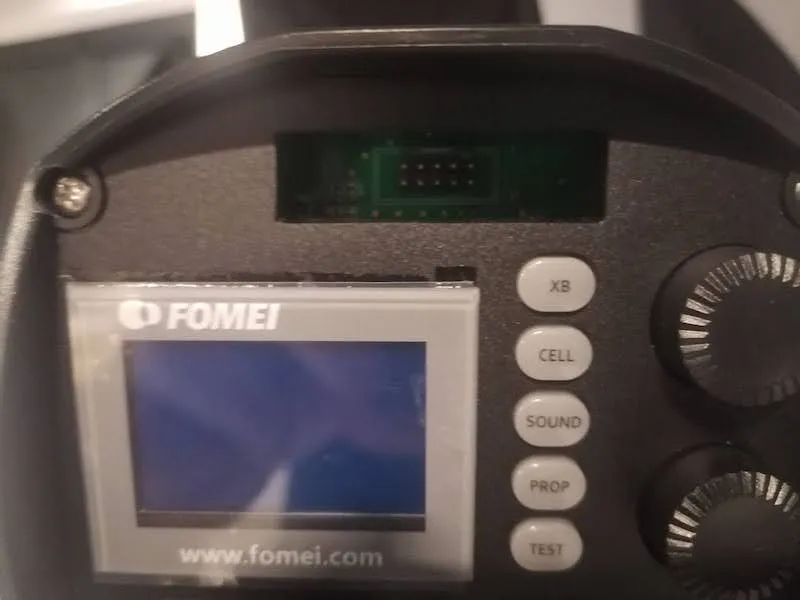
3.5.3. Luego, inserte receptores en cada luz y tenga en cuenta las etiquetas FOMEI para orientarse.


3.5.4. Enchufe los extremos libres de los cables de alimentación de las luces a la toma múltiple de alimentación.


3.5.5. Encienda todas las luces de flash.

3.5.6. Coloque las luces físicamente alrededor del robot en la siguiente configuración de luces recomendada.
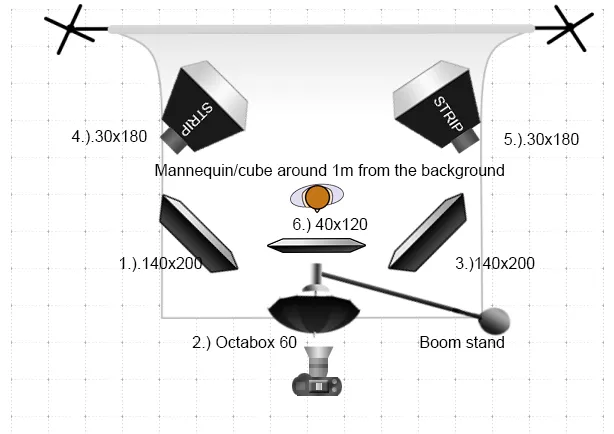
3.5.7. Tenga en cuenta que si se instala un soporte de brazo como en la configuración de luces recomendada, será necesario construir primero el soporte de brazo. Para construir un soporte de brazo, necesitará un trípode, un poste de brazo de pared de 1,5 metros y un juego de brazo de pared.



Además, consulte las siguientes imágenes para la construcción del soporte de la pluma.
a) Abrazadera de poste de pluma de pared:
b) Peso de equilibrio en el extremo del poste para soportar la luz:

c) Imagen ilustrativa de un soporte de pluma construido:

4. Software PhotoRobot _Controls
El software PhotoRobot _Controls App proporciona control sobre toda la estación de trabajo robótica Cube V5 / V6 / Compact. Esto incluye el control remoto de todos los robots, cámaras e iluminación. El software gestiona el flujo de trabajo y proporciona la funcionalidad necesaria para una automatización eficaz en el campo del posprocesamiento.
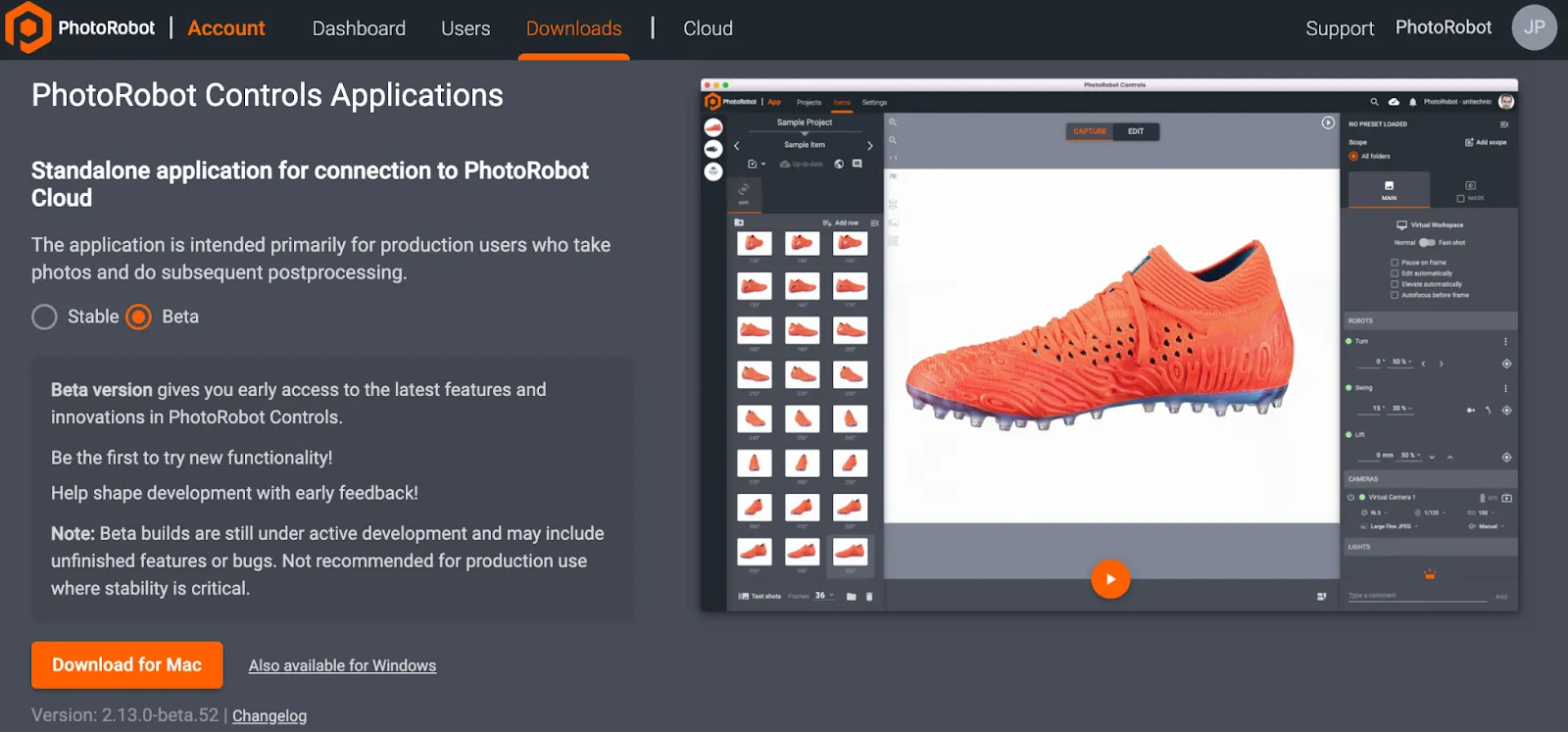
PhotoRobot _Controls software de la aplicación está disponible para descargar a través de su cuenta PhotoRobot. No está incluido con la entrega de la máquina. PhotoRobot _Controls software de la aplicación se compra por separado de la máquina.
Además, después de iniciar la aplicación de software, tenga en cuenta que la interfaz puede iniciarse automáticamente en "modo asistente". El modo asistente es una interfaz de usuario simplificada. Permite, por ejemplo, el escaneo de códigos de barras para identificar objetos y comenzar las secuencias de captura y posprocesamiento automáticamente.
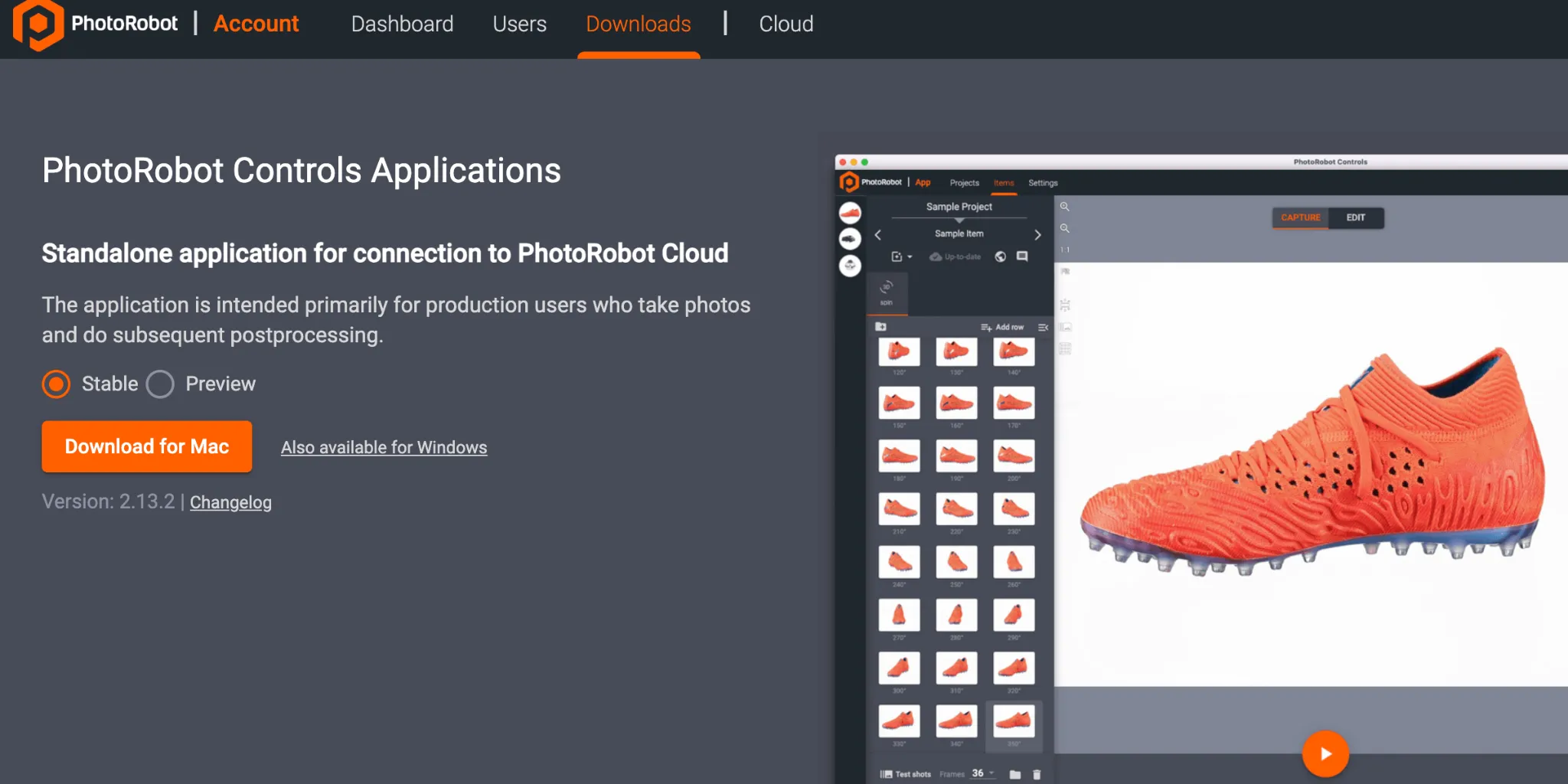
Nota: Tanto la versión estable como la versión preliminar de CAPP están disponibles para su descarga a través del asistente del instalador. La versión estable contiene la versión más reciente de CAPP y recibe versiones frecuentes. Mientras tanto, la versión preliminar de CAPP proporciona acceso anticipado a las últimas funciones y correcciones que se transfieren a la versión estable a los pocos días del desarrollo. Esto permite a los usuarios probar cualquier problema que ocurra en la versión preliminar antes de ponerse en contacto con el soporte técnico, ya que la mayoría de los problemas informados en la versión estable ya se han resuelto en la versión preliminar. Sin embargo, tenga en cuenta que la versión preliminar no se recomienda para uso en producción en el que la estabilidad es un factor crítico. La versión preliminar está en desarrollo activo, que aún puede incluir características incompletas o errores no resueltos.
Importante: Las versiones anteriores de CAPP no están destinadas a la distribución pública o del cliente debido al riesgo de corrupción de la base de datos. Las versiones anteriores de CAPP solo son accesibles para técnicos autorizados de PhotoRobot para desarrollo interno o para casos de uso extremadamente especiales. Para encontrar la última versión estable y la versión preliminar de CAPP, consulte Últimas versiones de descarga de CAPP.
Para obtener asistencia o solución de problemas de PhotoRobot _Controls aplicación, consulte PhotoRobot Introducción.
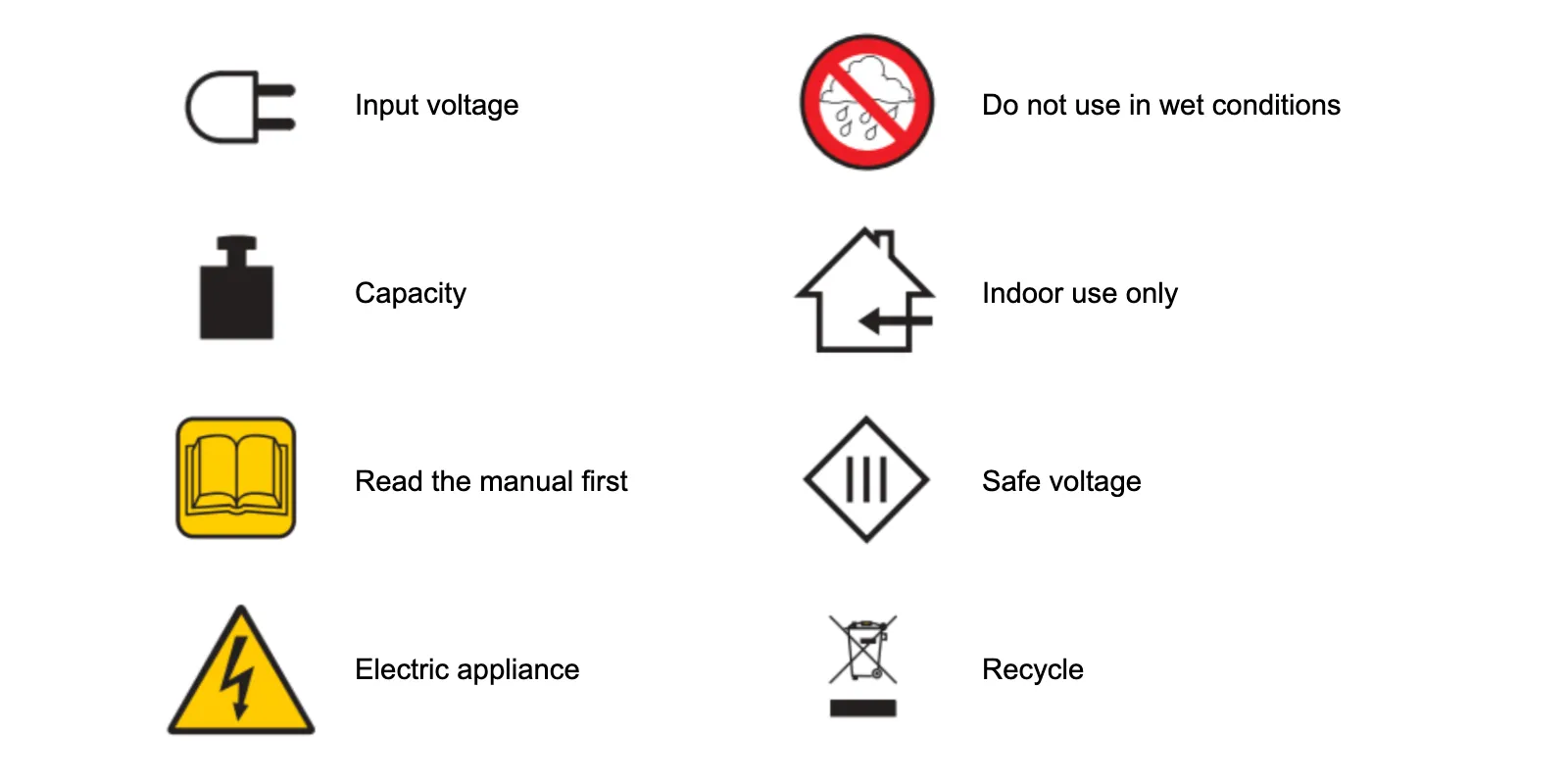
5. Etiquetas de información
5.1. Descripción general de los símbolos
5.2. Etiquetas compactas de cubo



Serie EOS Rebel


Serie EOS DSLR


Serie mirrorless EOS M


Serie PowerShot


Primer plano / Portátil

La serie EOS Rebel de Canon ofrece cámaras DSLR para principiantes con una calidad de imagen sólida, controles intuitivos y funciones versátiles. Ideales para los entusiastas de la fotografía, estas cámaras proporcionan un enfoque automático fiable, pantallas táctiles de ángulo variable y grabación de vídeo Full HD o 4K.
Conexión
Resolución (MP)
Resolución
La serie EOS DSLR de Canon ofrece imágenes de alta calidad, enfoque automático rápido y versatilidad, lo que la hace ideal tanto para la fotografía como para la producción de vídeo.
Conexión
Resolución (MP)
Resolución
La serie mirrorless EOS M de Canon combina un diseño compacto con un rendimiento similar al de una cámara réflex. Con lentes intercambiables, enfoque automático rápido y sensores de imagen de alta calidad, estas cámaras son ideales para viajeros y creadores de contenido que buscan portabilidad sin sacrificar la calidad de la imagen.
Conexión
Resolución (MP)
Resolución
La serie PowerShot de Canon ofrece cámaras compactas y fáciles de usar para fotógrafos ocasionales y entusiastas. Con modelos que van desde simples cámaras de apuntar y disparar hasta cámaras con zoom avanzado, brindan comodidad, calidad de imagen sólida y funciones como estabilización de imagen y video 4K.
Conexión
Resolución (MP)
Resolución
Las cámaras de mano y primeros planos de Canon están diseñadas para fotografía y vídeo detallados y de cerca. Compactos y fáciles de usar, ofrecen un enfoque de precisión, imágenes de alta resolución y capacidades macro versátiles, perfectas para vlogs, fotografía de productos y primeros planos creativos.


