Guía de centrado y alineación láser PhotoRobot
Este manual de soporte al usuario proporciona instrucciones técnicas sobre cómo alinear y centrar los sistemas de láser cruzado incorporados de PhotoRobot. Siga estos pasos para encontrar el punto medio de cualquier placa redonda de PhotoRobot usando dos láseres. Las instrucciones incluyen cómo mover físicamente los láseres al centro de la mesa, la configuración inicial del láser y cómo ajustar el posicionamiento del láser. Además, al final del manual, hay instrucciones para alinear y centrar el sistema láser especial de la plataforma giratoria C1300 (anteriormente distribuido bajo el nombre de Case 1300).
Importante: Siempre consulte primero la Información e instrucciones de seguridad de PhotoRobot, además del manual proporcionado específicamente con su dispositivo antes de cualquier autoinstalación o servicio.
Nota: Consulte Primer uso y pruebas básicas de PhotoRobot para obtener información detallada sobre la configuración de la red y los requisitos de la red.
1. Mueva físicamente los láseres al centro de la mesa
1.1. Antes de comenzar, establezca una conexión entre el PhotoRobot y la red local. A continuación, encienda la unidad de control (6.ª generación) y una caja láser.
Nota: Para alinear y centrar el sistema láser para el tocadiscos C1300, consulte también las instrucciones especiales en la sección 4 de este manual del usuario.
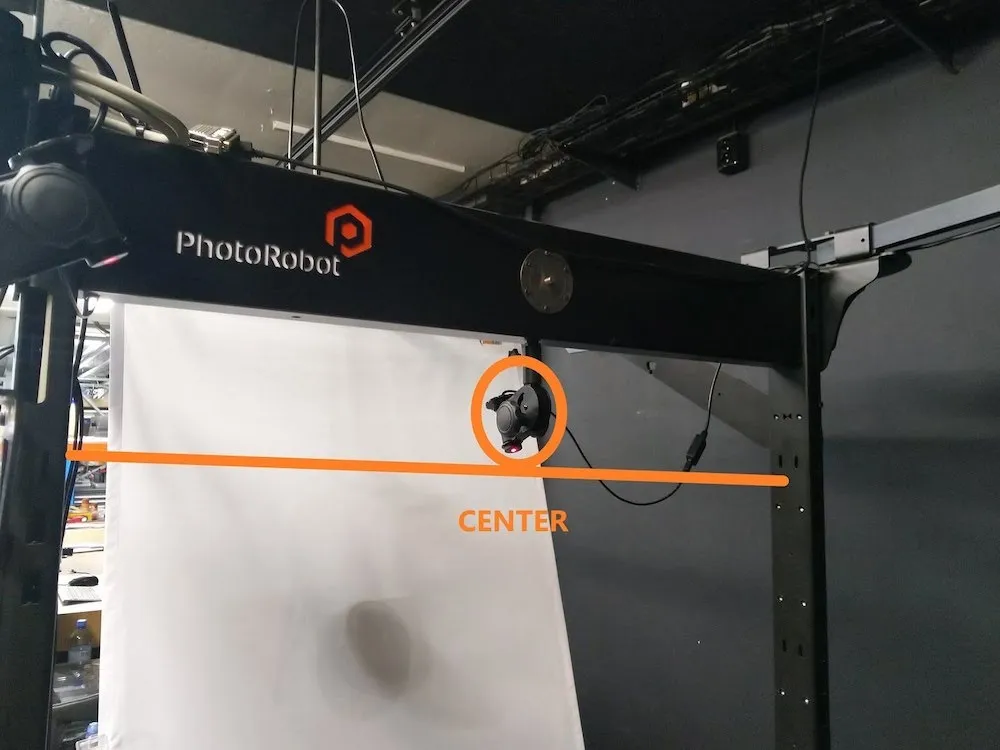
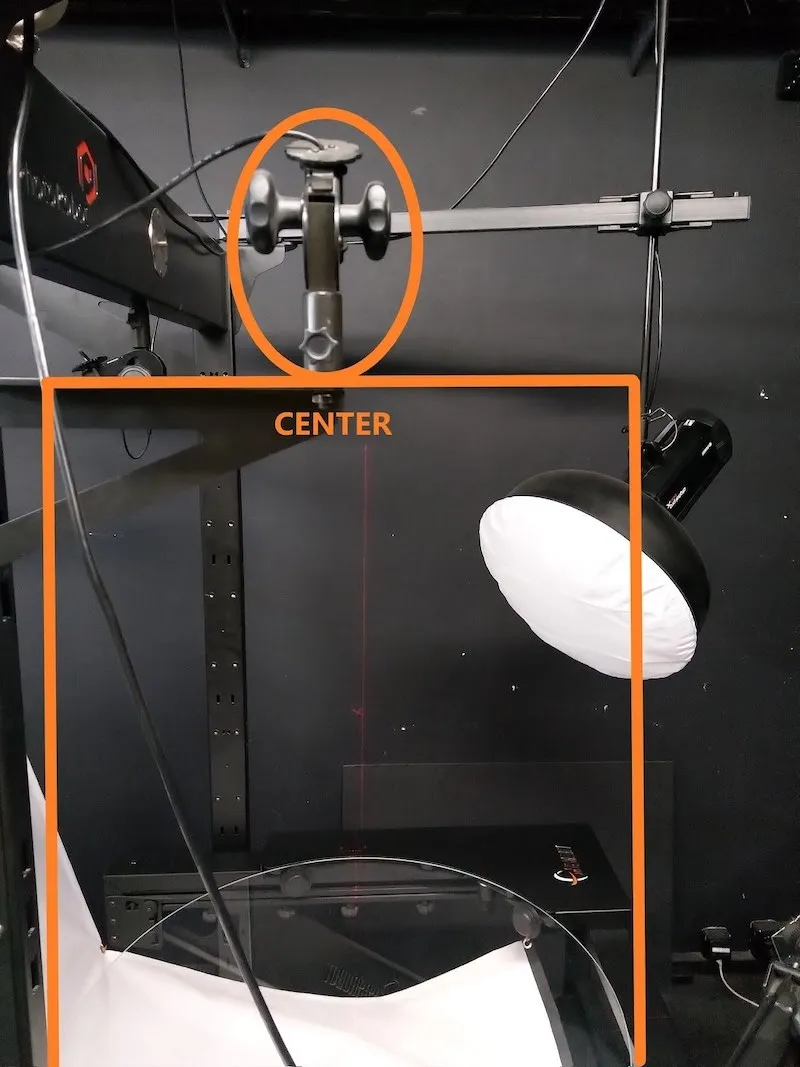
1.2. Después de conectar PhotoRobot a la red y encender la unidad de control y la caja láser, mida la distancia entre ambos lados de la mesa donde está montado el láser. Luego, gire o mueva el láser con la mano hacia el centro y fíjelo en su posición.
2. Estimar la configuración aproximada
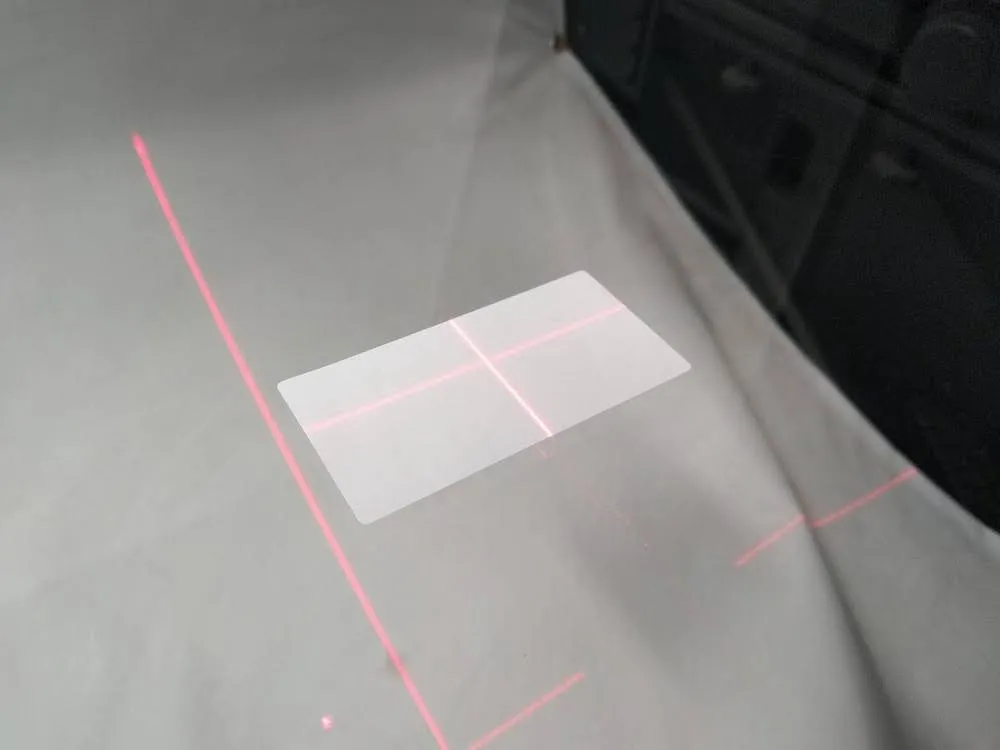
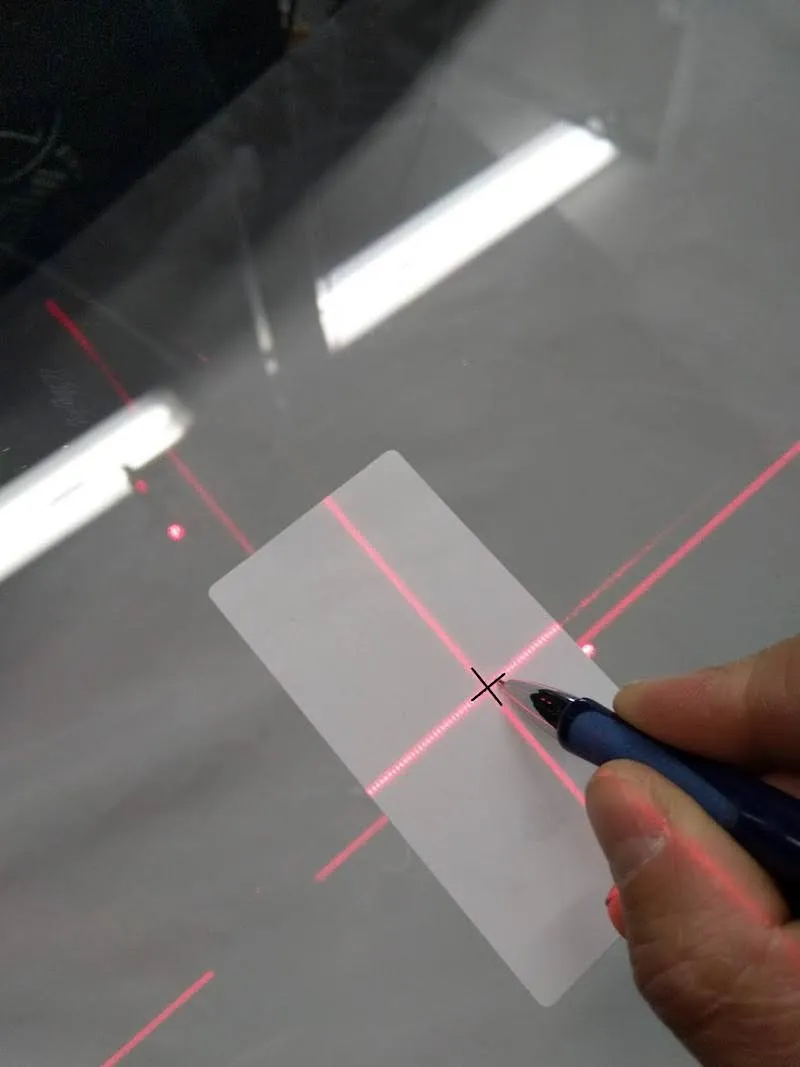
2.1. Cuando el láser esté fijado en su posición, coloque una pegatina en la placa del plato giratorio en el punto medio aproximado del vidrio. Los láseres se harán más visibles en la pegatina, lo que ayudará a estimar mejor el punto central de la placa.
2.2. Ajuste ambos láseres a mano para alinearlos en la pegatina que estima el punto medio aproximado.
3. Ajuste fino de la alineación del láser
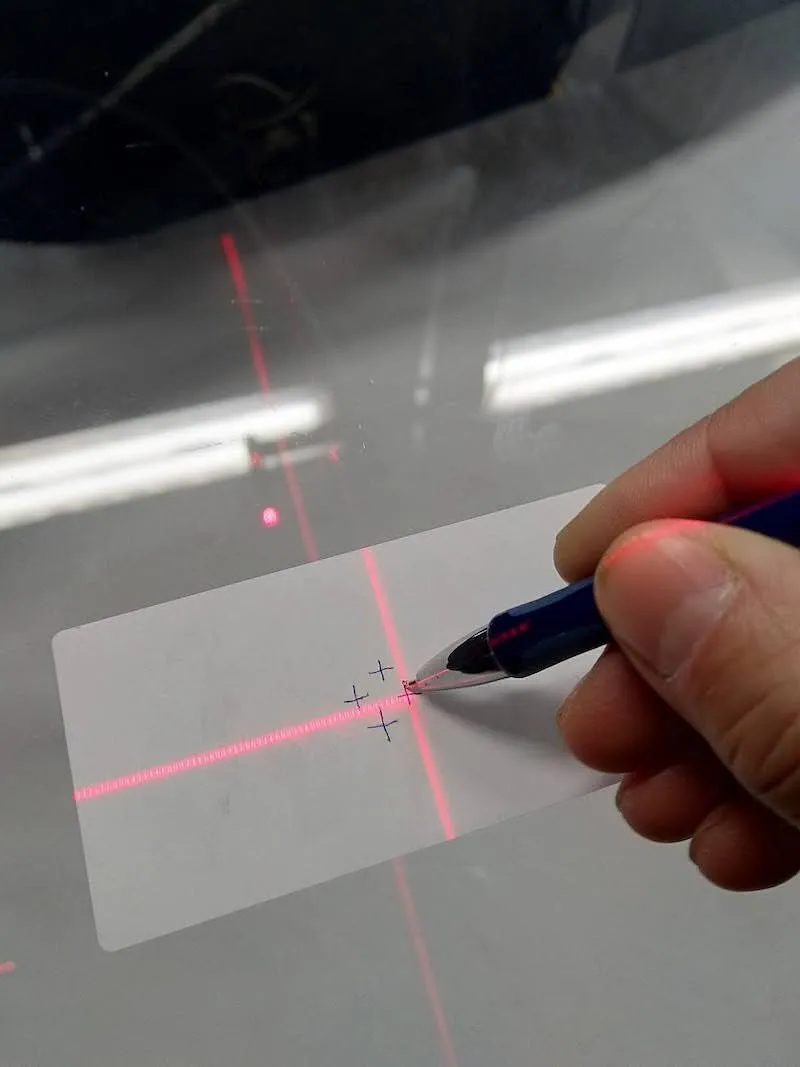
3.1. Traza una pequeña cruz en la pegatina copiando la cruz roja de los láseres.
3.2. A continuación, inicie la aplicación Locator en su teléfono móvil, busque la Unidad de Control asignada al robot y acceda a la GUI del servicio. Nota: Para obtener instrucciones detalladas sobre la creación de redes, consulte Requisitos previos detallados de redes de PhotoRobot (sección 8: Información del apéndice). Luego, busque la unidad de control asignada al robot y acceda a su GUI.

3.3. En la GUI de servicio, use los controles de giro para girar el vidrio 90 grados y vuelva a trazar la posición de los láseres cruzados en la pegatina. Repita este paso dos veces: gire el vidrio 90 grados, trace la cruz láser, gire 90 grados y trace la cruz láser por última vez.
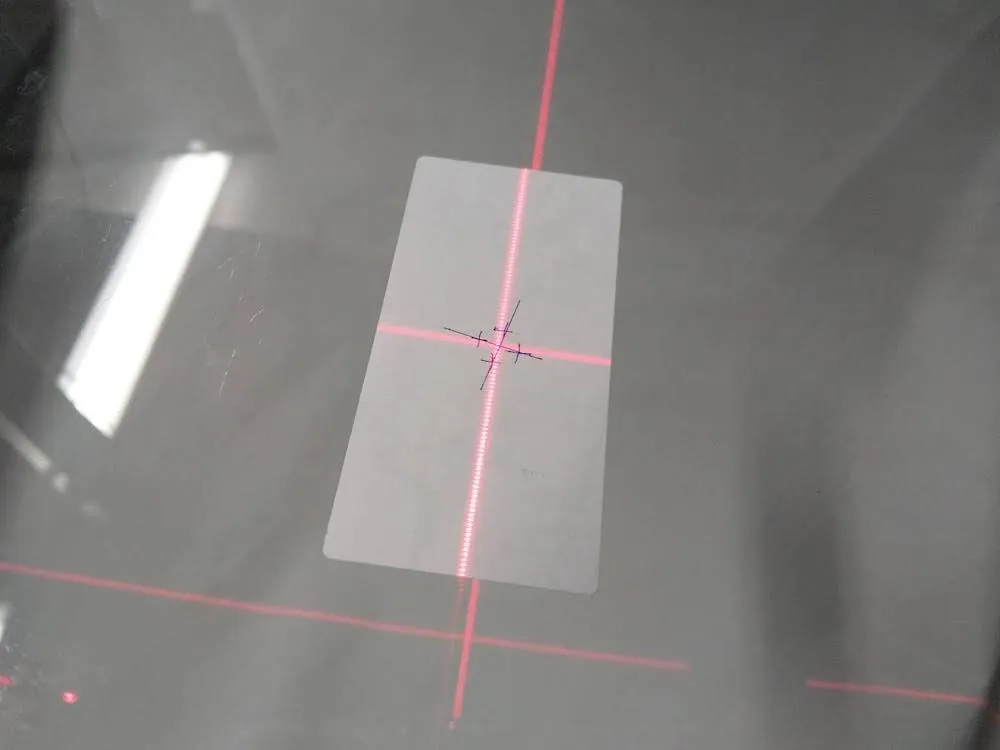
3.4. Después de trazar las cuatro cruces en la pegatina, conecte cada cruz opuesta en líneas rectas. La cruz resultante entre las cruces individuales representará el punto medio real de la placa de vidrio.
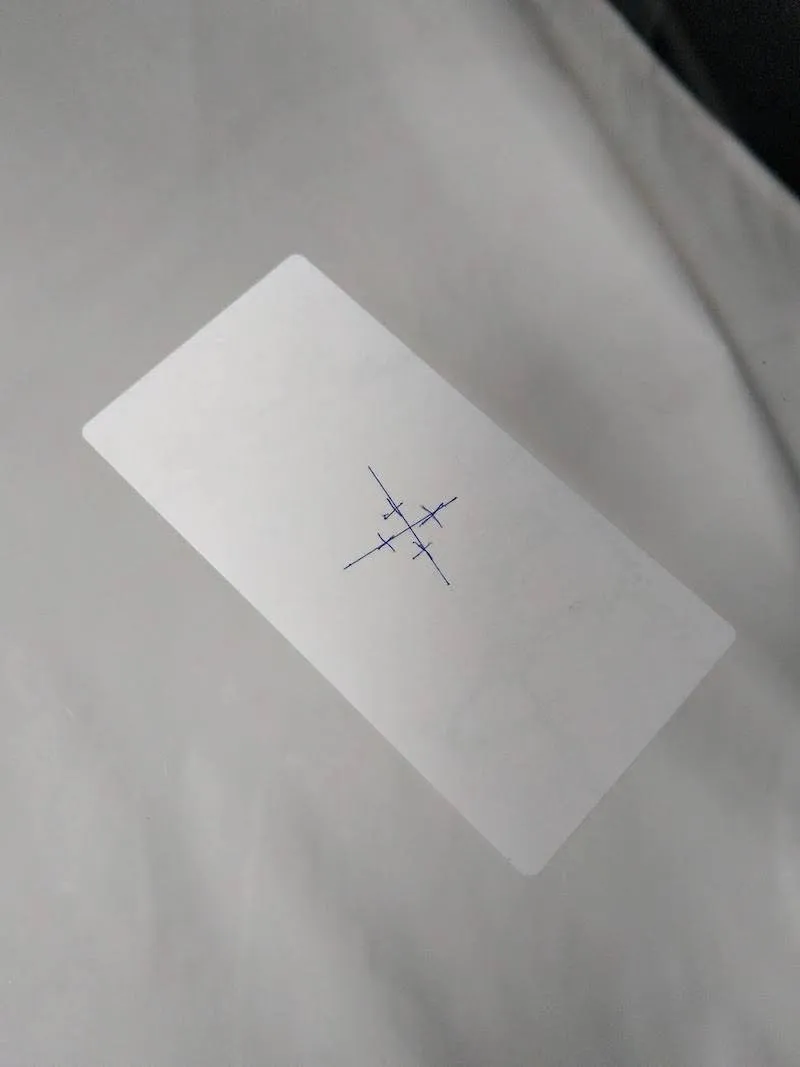
3.5. Finalmente, ajuste ambos láseres al punto medio identificado. El sistema láser ahora estará centrado y alineado con el centro absoluto de la rotación de la placa.
4. Alineación y centrado de láseres especiales C1300
4.1. Al alinear y centrar los láseres en el robot C1300, tenga en cuenta el sistema láser especializado. El sistema láser C1300 tiene varias diferencias en comparación con otros PhotoRobot. Aunque los principios físicos son los mismos, la construcción del sistema láser C1300 cuenta con una instalación de cuatro láseres.
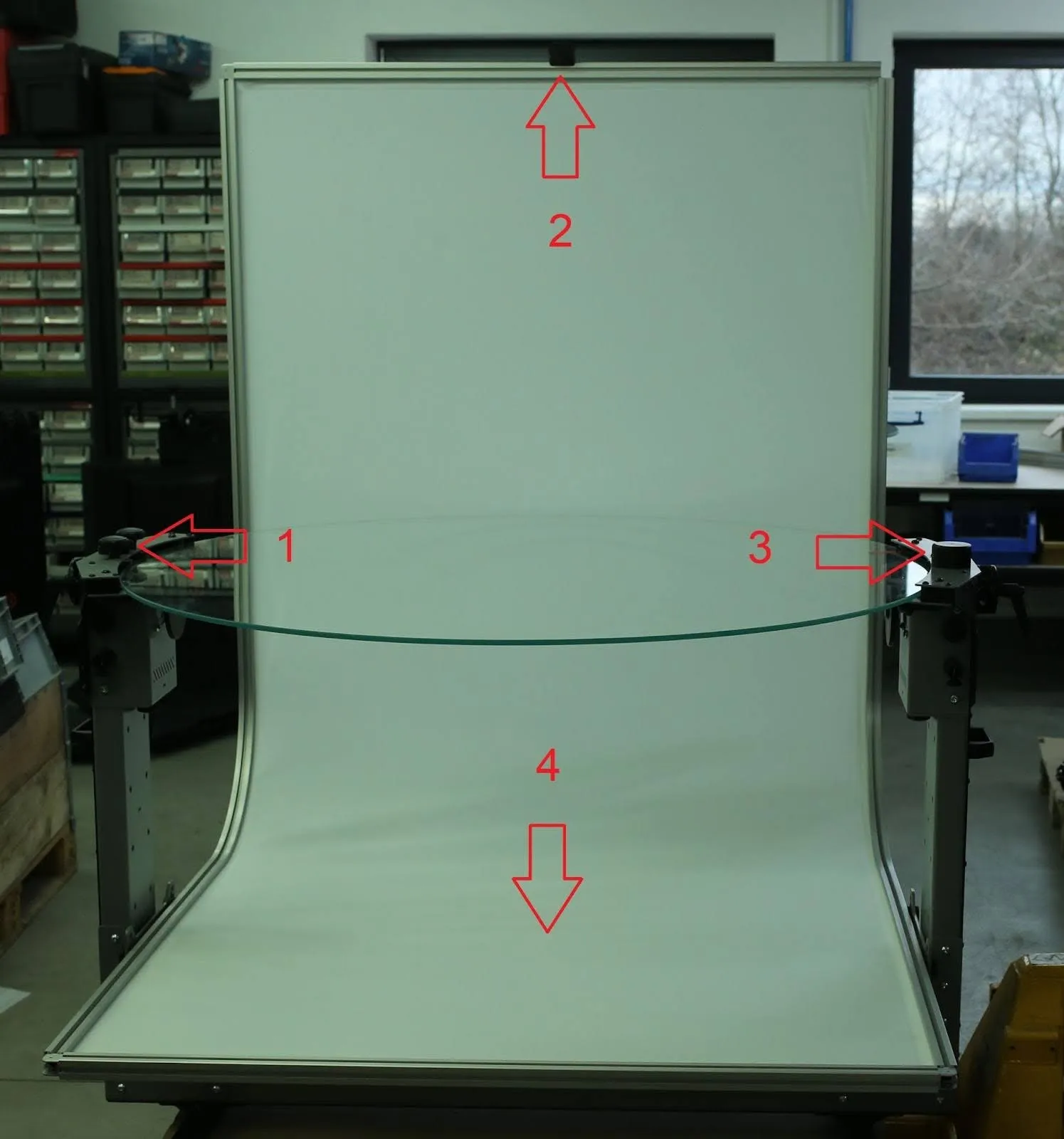
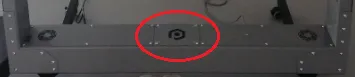
4.2. En este sistema, Laser 4 es una parte integral del esqueleto del robot C1300. Laser 4 es un láser cruzado y brilla a través del fondo blanco desde la parte inferior. Para ajustar la posición del láser, busque los cuatro tornillos plateados para descubrir la parte cuadrada central que alberga el láser.
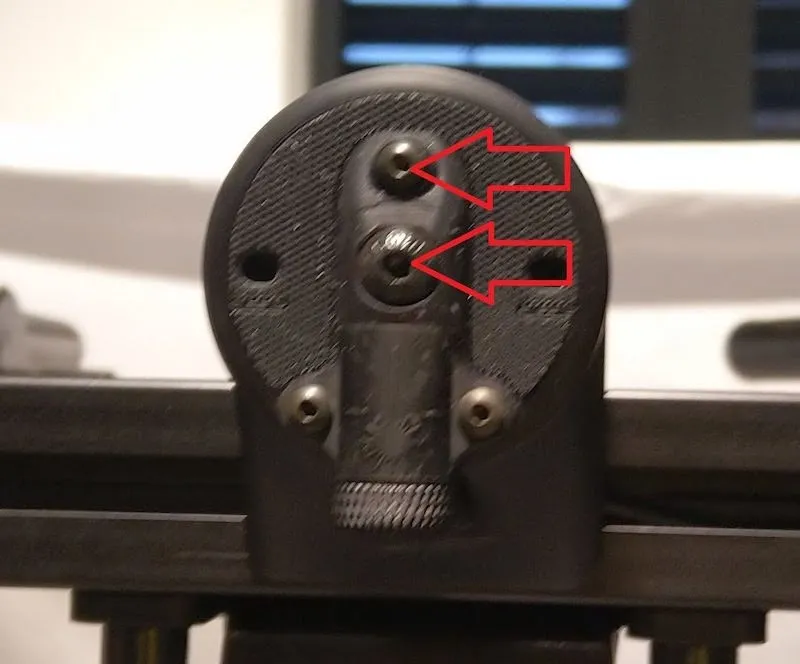
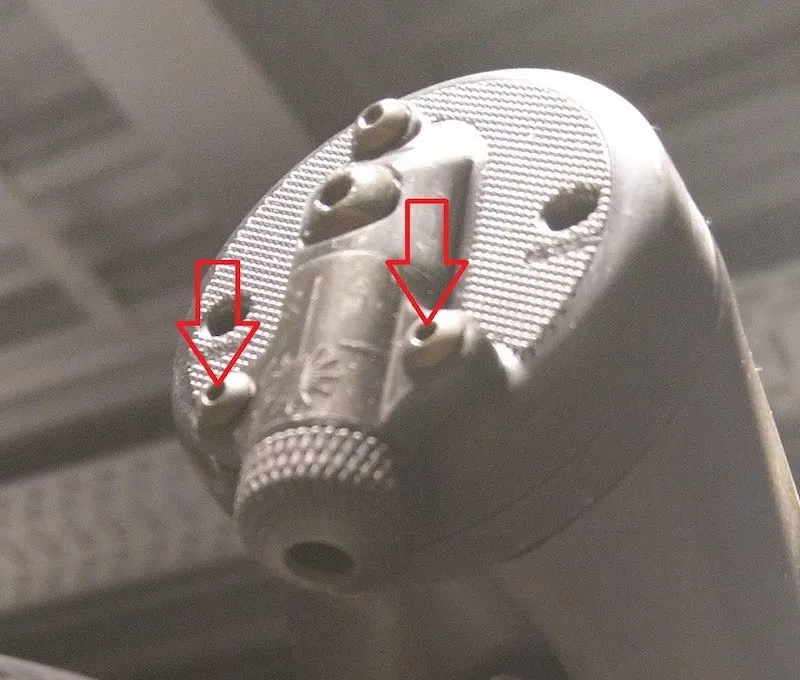
4.3. Después de descubrir la carcasa de la parte cuadrada central Laser 4, use los dos tornillos que sujetan la carcasa del láser de plástico para ajustar su posición manualmente.
Nota: Laser 1, Laser 2 y Laser 3 tienen la misma construcción que Laser 4. También son todos láseres de línea:



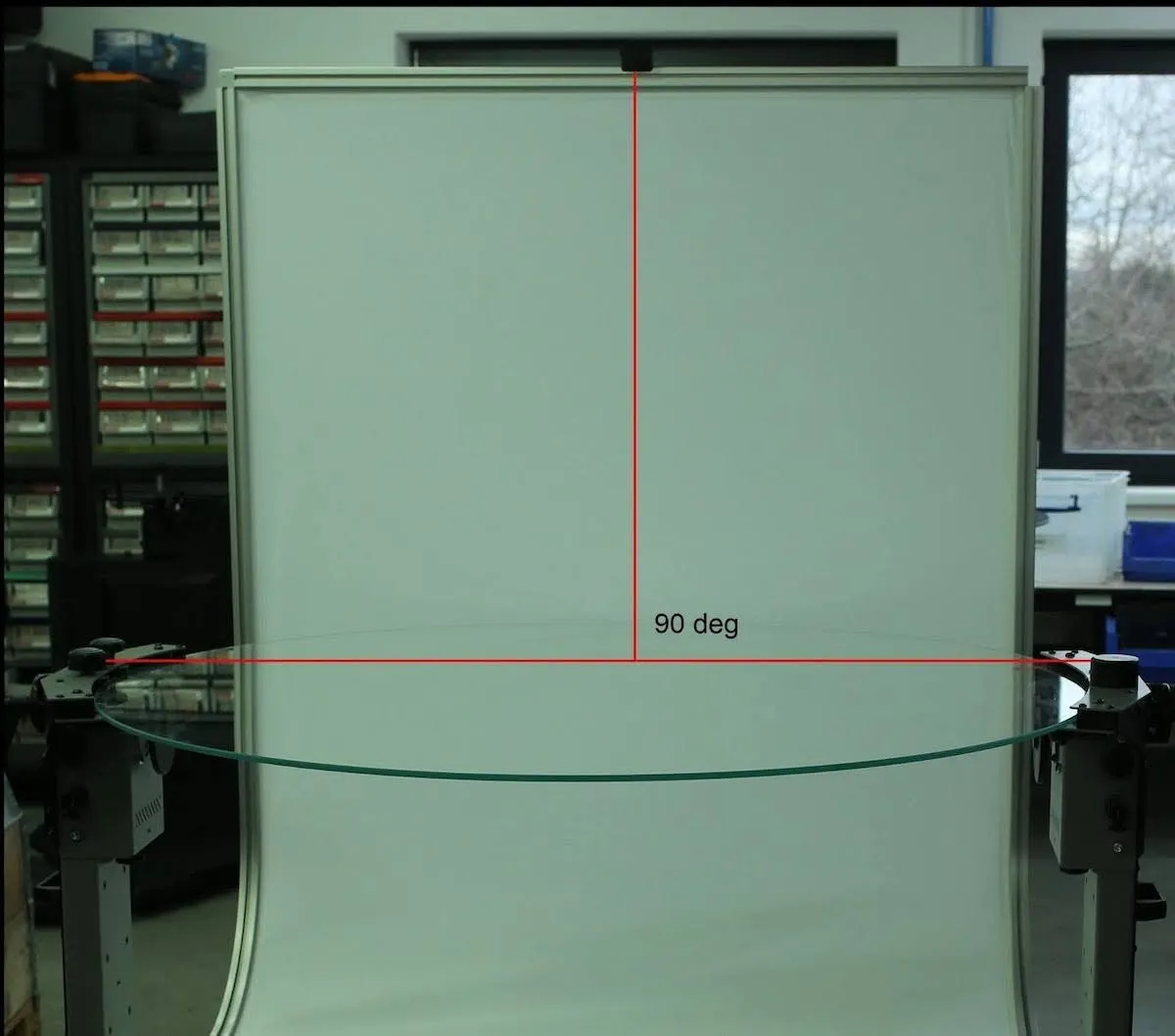
4.4. Finalmente, al alinear y centrar los láseres, asegúrese de que haya un ángulo de 90 grados entre la línea láser desde el láser superior y la placa de vidrio.


Serie EOS Rebel


Serie EOS DSLR


Serie mirrorless EOS M


Serie PowerShot


Primer plano / Portátil

La serie EOS Rebel de Canon ofrece cámaras DSLR para principiantes con una calidad de imagen sólida, controles intuitivos y funciones versátiles. Ideales para los entusiastas de la fotografía, estas cámaras proporcionan un enfoque automático fiable, pantallas táctiles de ángulo variable y grabación de vídeo Full HD o 4K.
Conexión
Resolución (MP)
Resolución
La serie EOS DSLR de Canon ofrece imágenes de alta calidad, enfoque automático rápido y versatilidad, lo que la hace ideal tanto para la fotografía como para la producción de vídeo.
Conexión
Resolución (MP)
Resolución
La serie mirrorless EOS M de Canon combina un diseño compacto con un rendimiento similar al de una cámara réflex. Con lentes intercambiables, enfoque automático rápido y sensores de imagen de alta calidad, estas cámaras son ideales para viajeros y creadores de contenido que buscan portabilidad sin sacrificar la calidad de la imagen.
Conexión
Resolución (MP)
Resolución
La serie PowerShot de Canon ofrece cámaras compactas y fáciles de usar para fotógrafos ocasionales y entusiastas. Con modelos que van desde simples cámaras de apuntar y disparar hasta cámaras con zoom avanzado, brindan comodidad, calidad de imagen sólida y funciones como estabilización de imagen y video 4K.
Conexión
Resolución (MP)
Resolución
Las cámaras de mano y primeros planos de Canon están diseñadas para fotografía y vídeo detallados y de cerca. Compactos y fáciles de usar, ofrecen un enfoque de precisión, imágenes de alta resolución y capacidades macro versátiles, perfectas para vlogs, fotografía de productos y primeros planos creativos.


